Hexapod H2
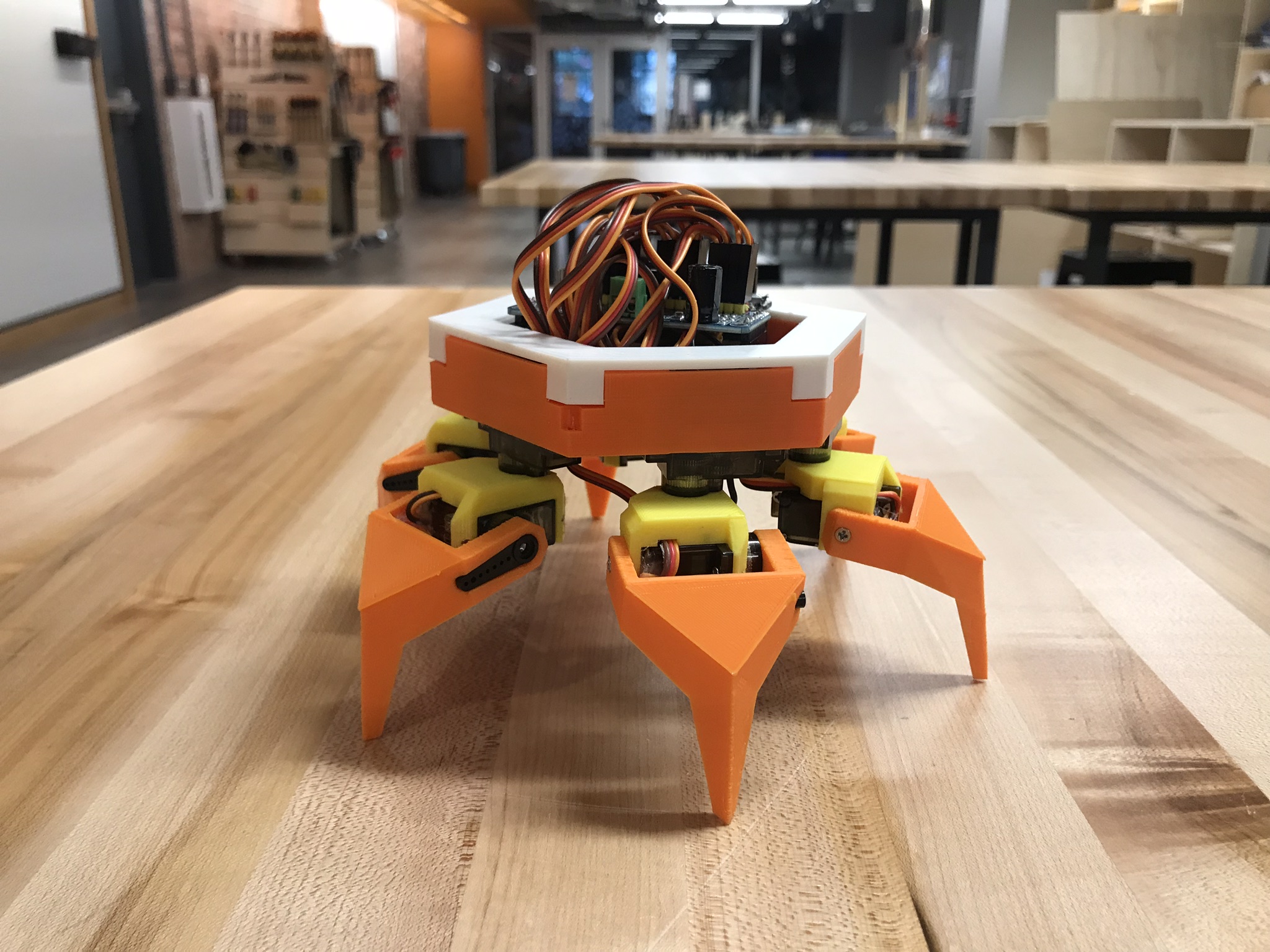
This is version H2 of my open-source hexapod series - and the 4th one I've built overall. For more details on how I started this "crazy heist", go to the prototypes page.
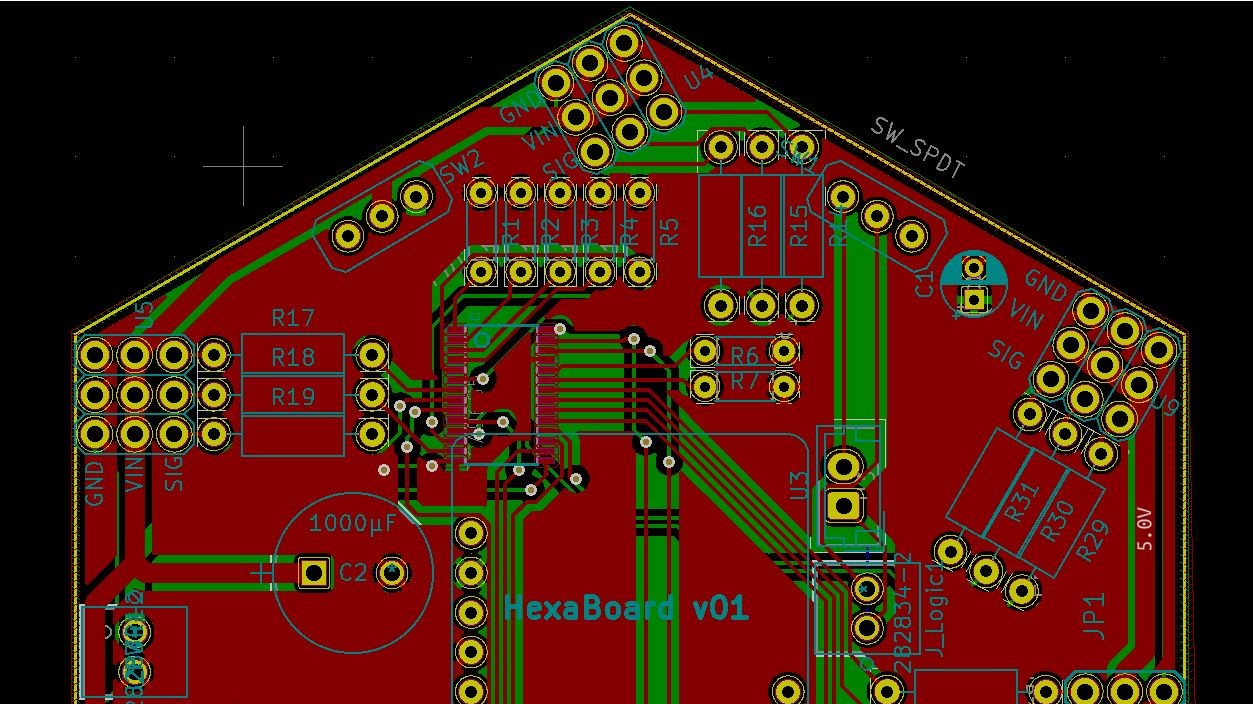
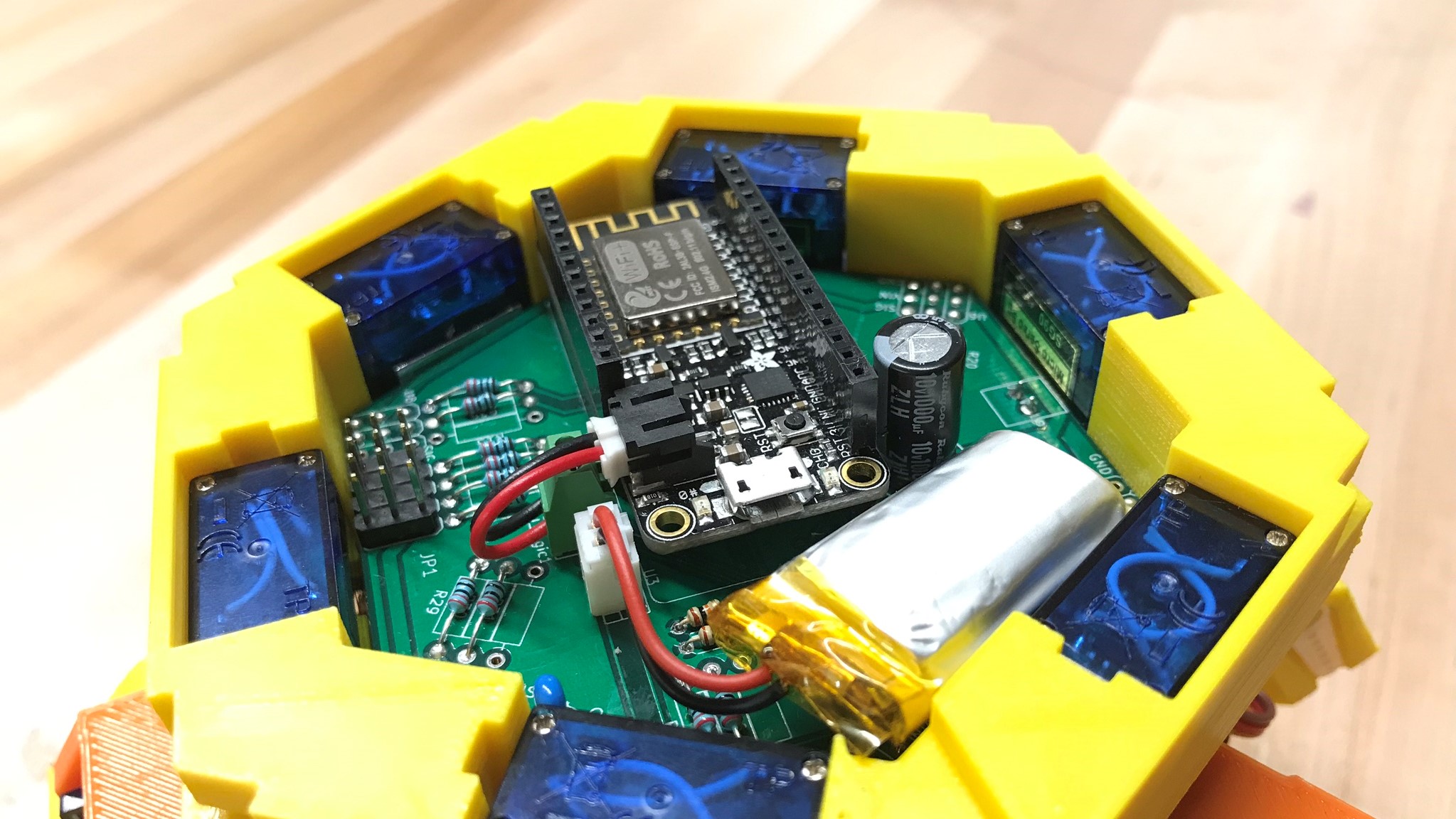
One of the biggest improvents I made on H2 compared to Version H1 is that I designed a hexagon-shape PCB that consists a servo driver (based on Adafruit's PCA9685 driver), power switches, battery ports, and pin headers to connect to the Feather Hazzah.

H1 Versus H2
Details
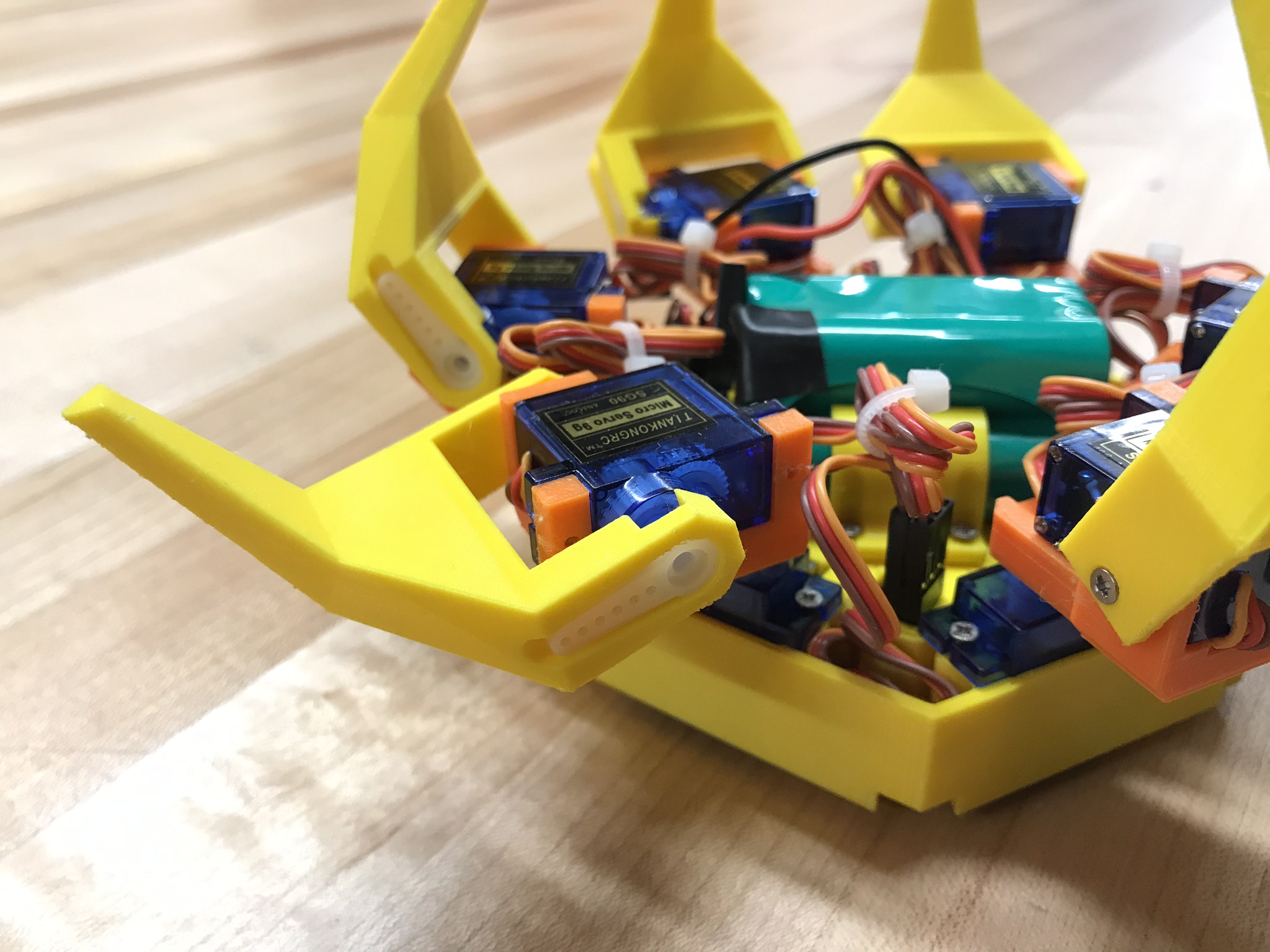
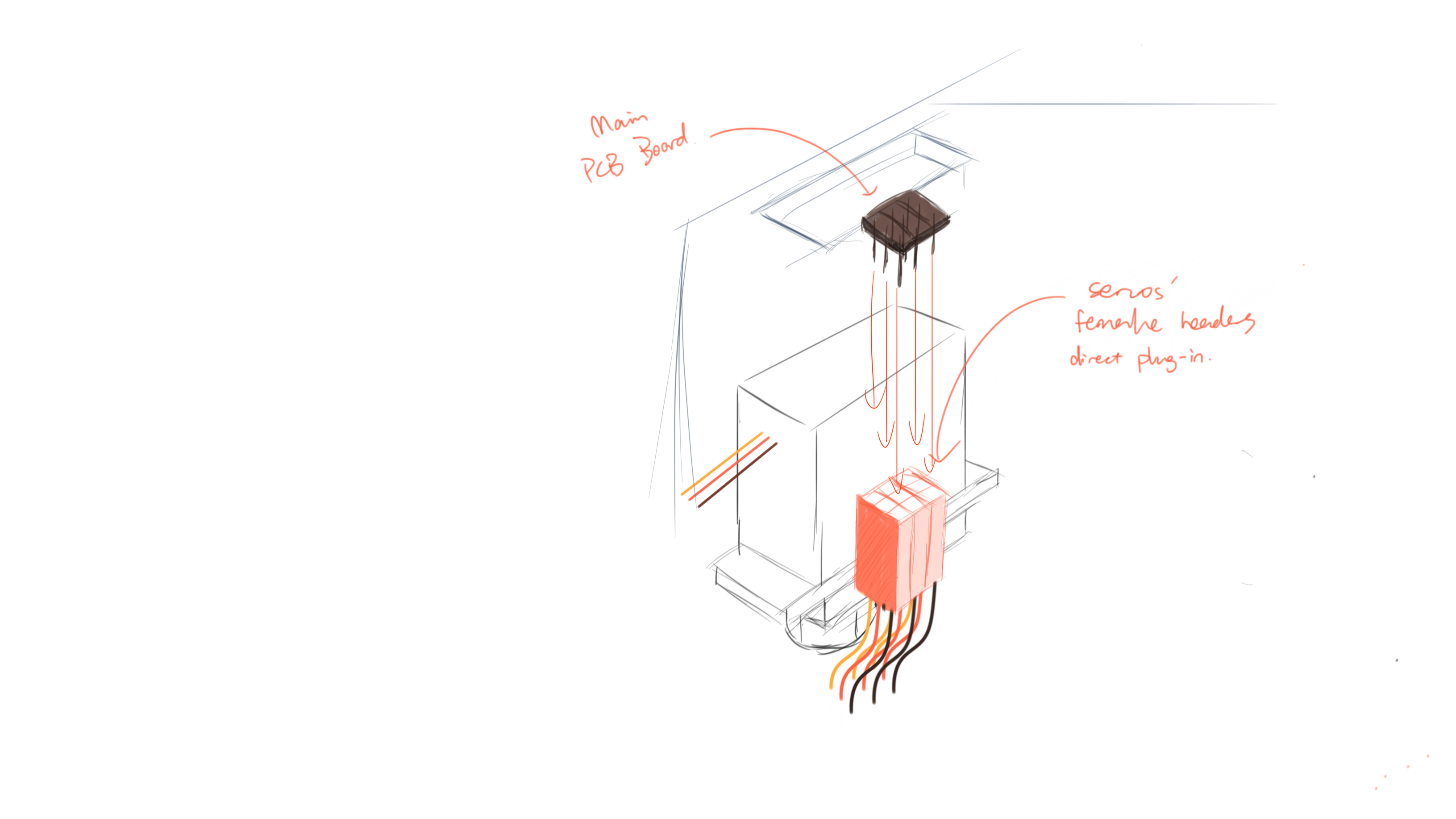
In the new PCB, I re-arranged the servo pins and distributed them downwards at the six corners of the board, so that the servos can be directly attached to the driver board without going into the structure and come out at the top - bringing the wire management system significantly cleaner.
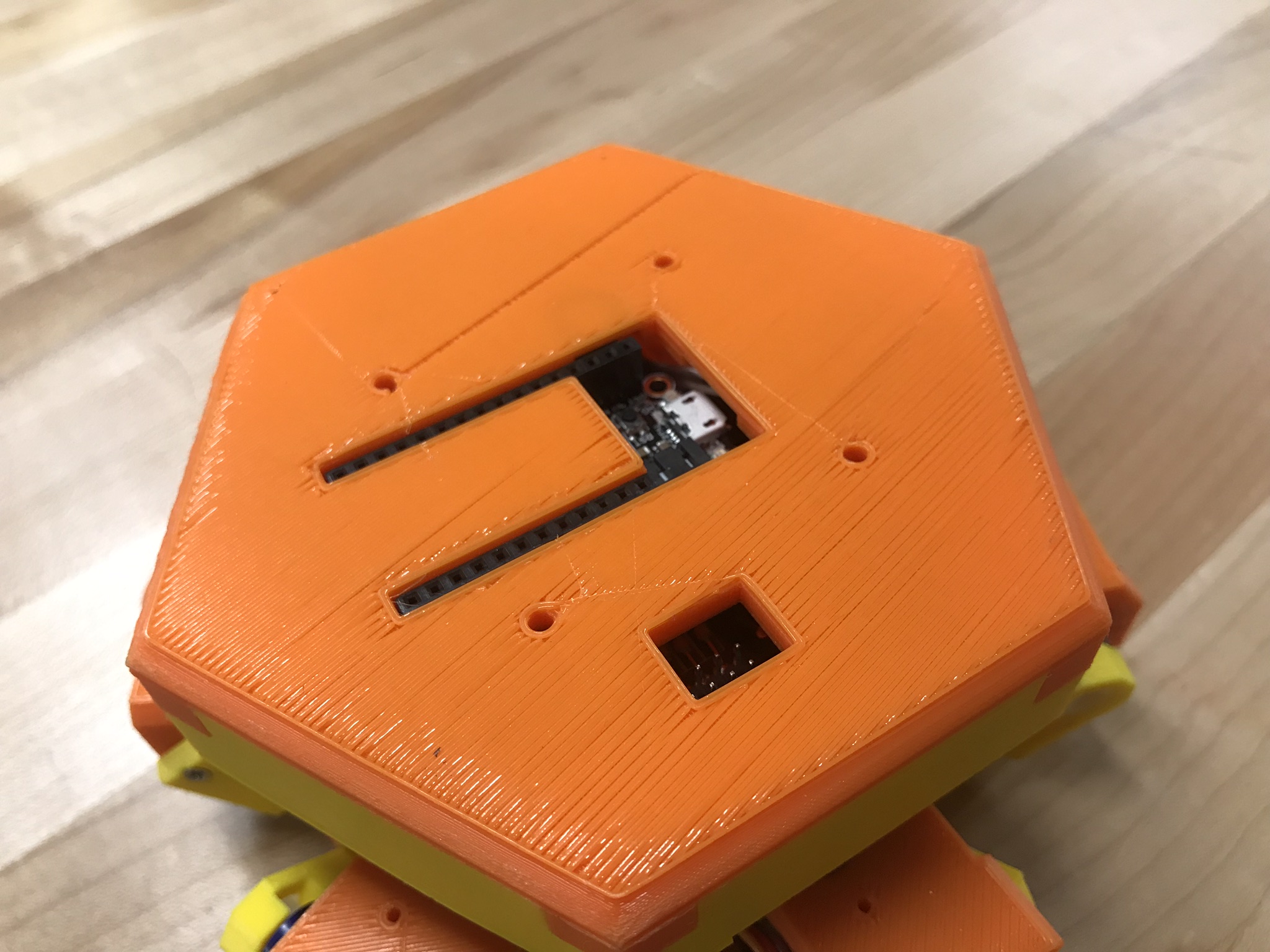
Freeing the top of the robot from tangling wires, I designed an extension-ready cover for H2. If later I or anyone else would like to add extra functions to the robot, we can simply design more PCBs to stack on top, and use the holes to mount other hardware components:


Building Process
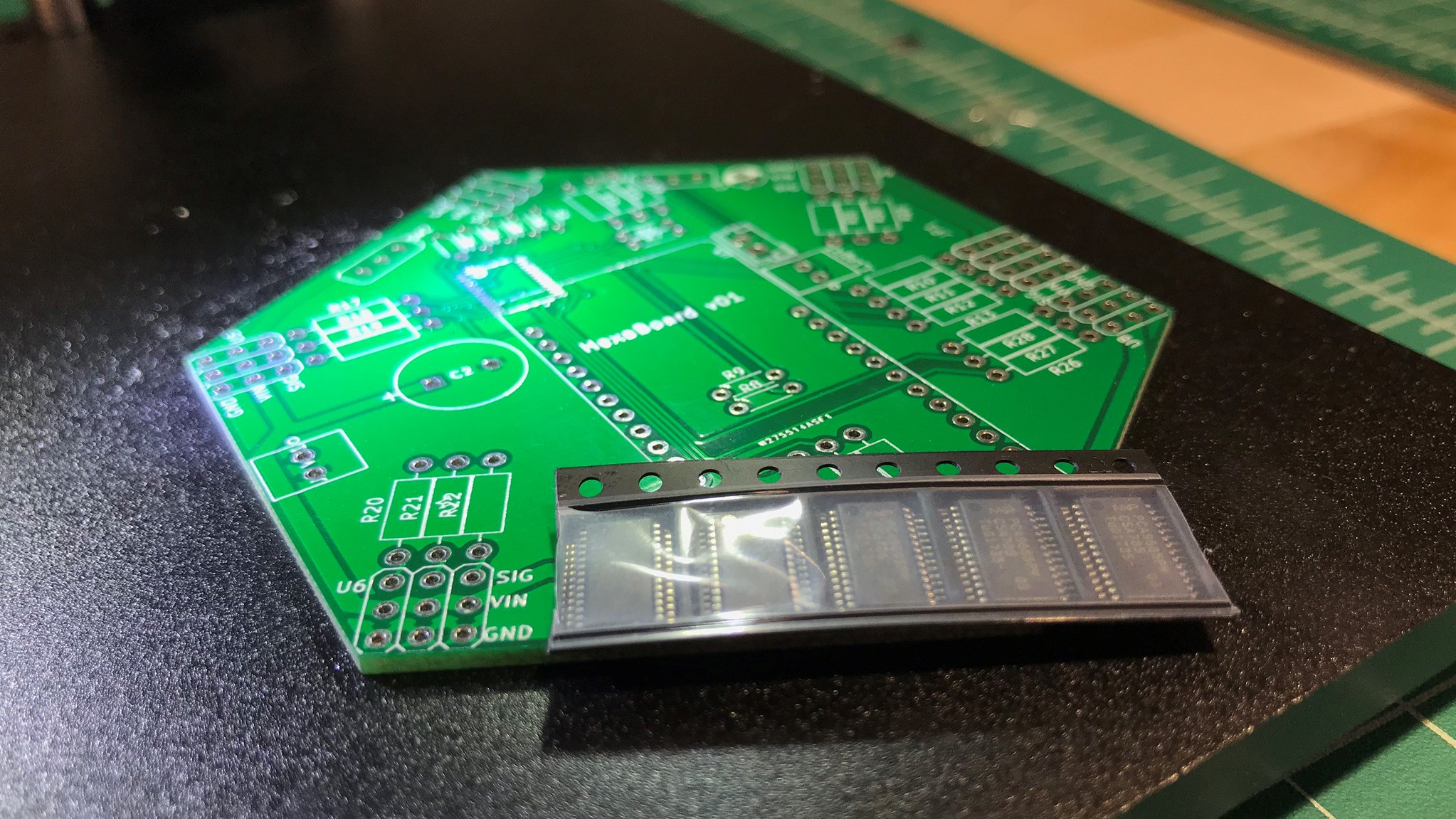
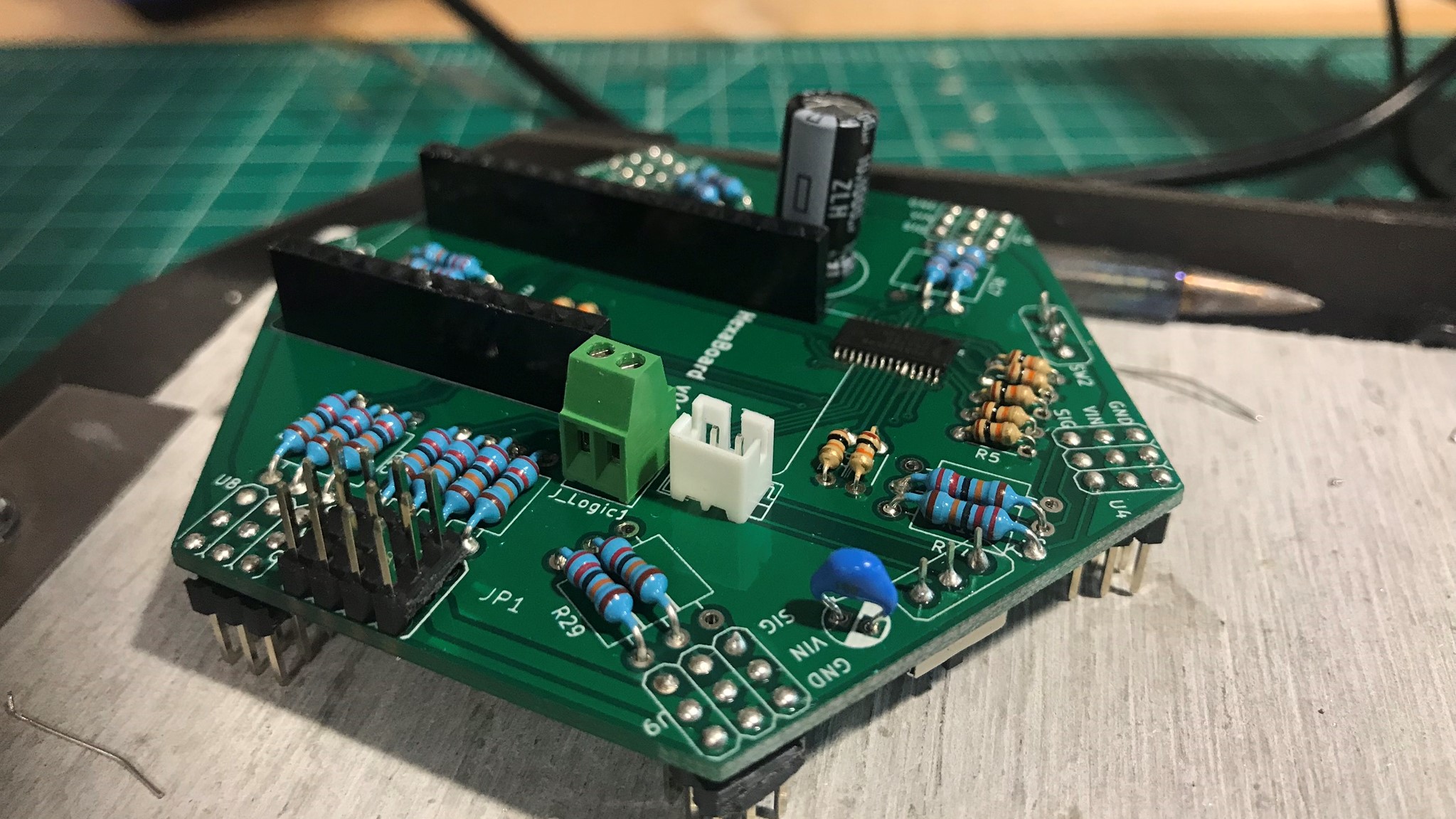
I adapted the design from the PCA9685 servo driver from Adafruit. I replaced all the surface mount parts (except the PCA9685 chip) to through-hole components, and sent the PCB files to a website to get it manufactured. I then later soldered the SMD chip to the board using a microscope.
I did not make too many changes on the 3D printed parts. Here's a sketch demonstrating the wire management ideas I have.
Time to Dance!