Hexapod Pumpkin Transformer
This Halloween, I built a hexapod pumpkin transformer to enter the annual Halloween Showcase at Tufts University Nolop Makerspace. I was partially inspired by a static, retractable spider pumpkin (link here) and decided to build a motorized version myself. I based the inner design on my previous hexapod builds, re-designed most of the outer structure, and put everything together in two weeks.

Details
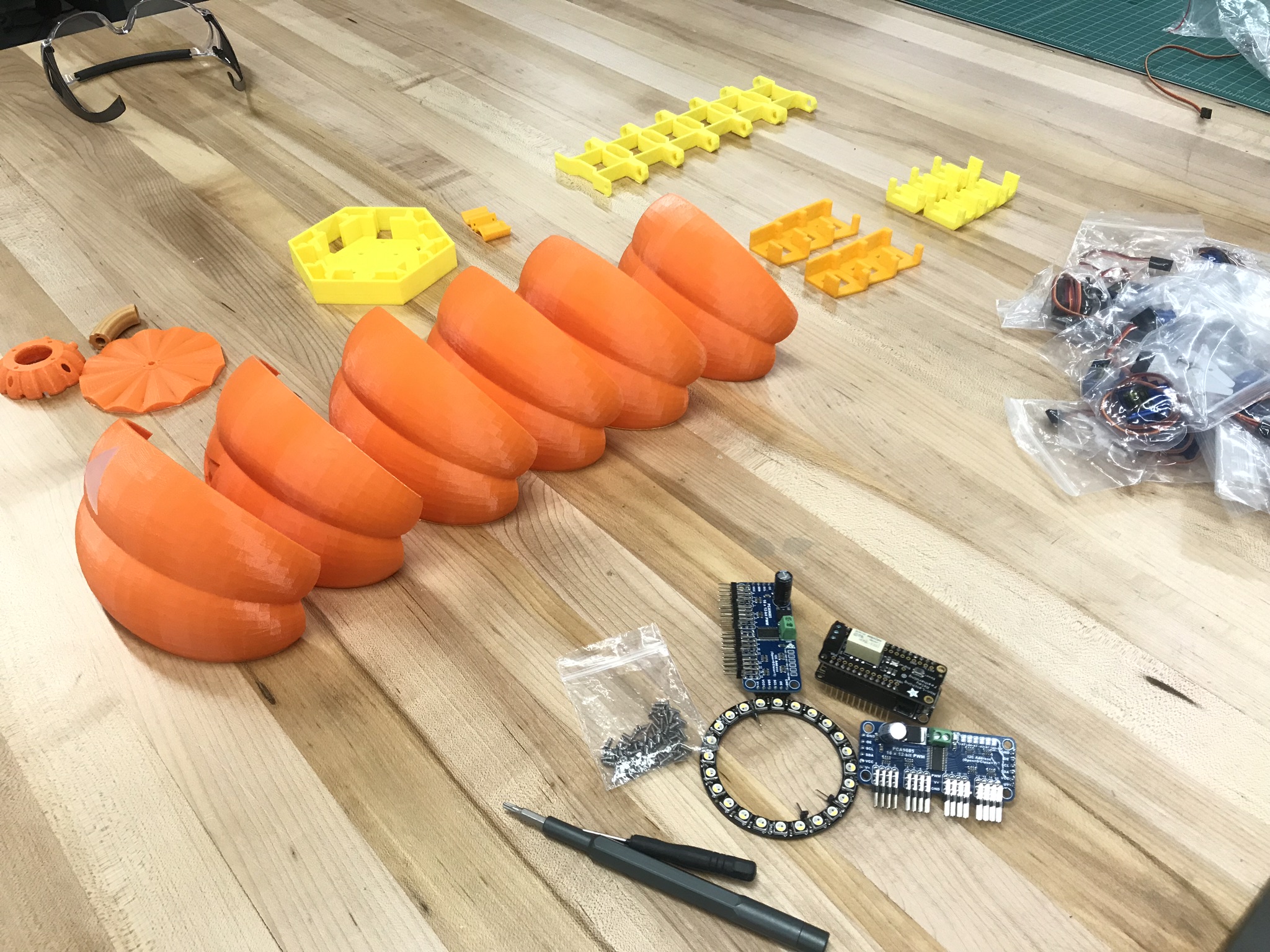
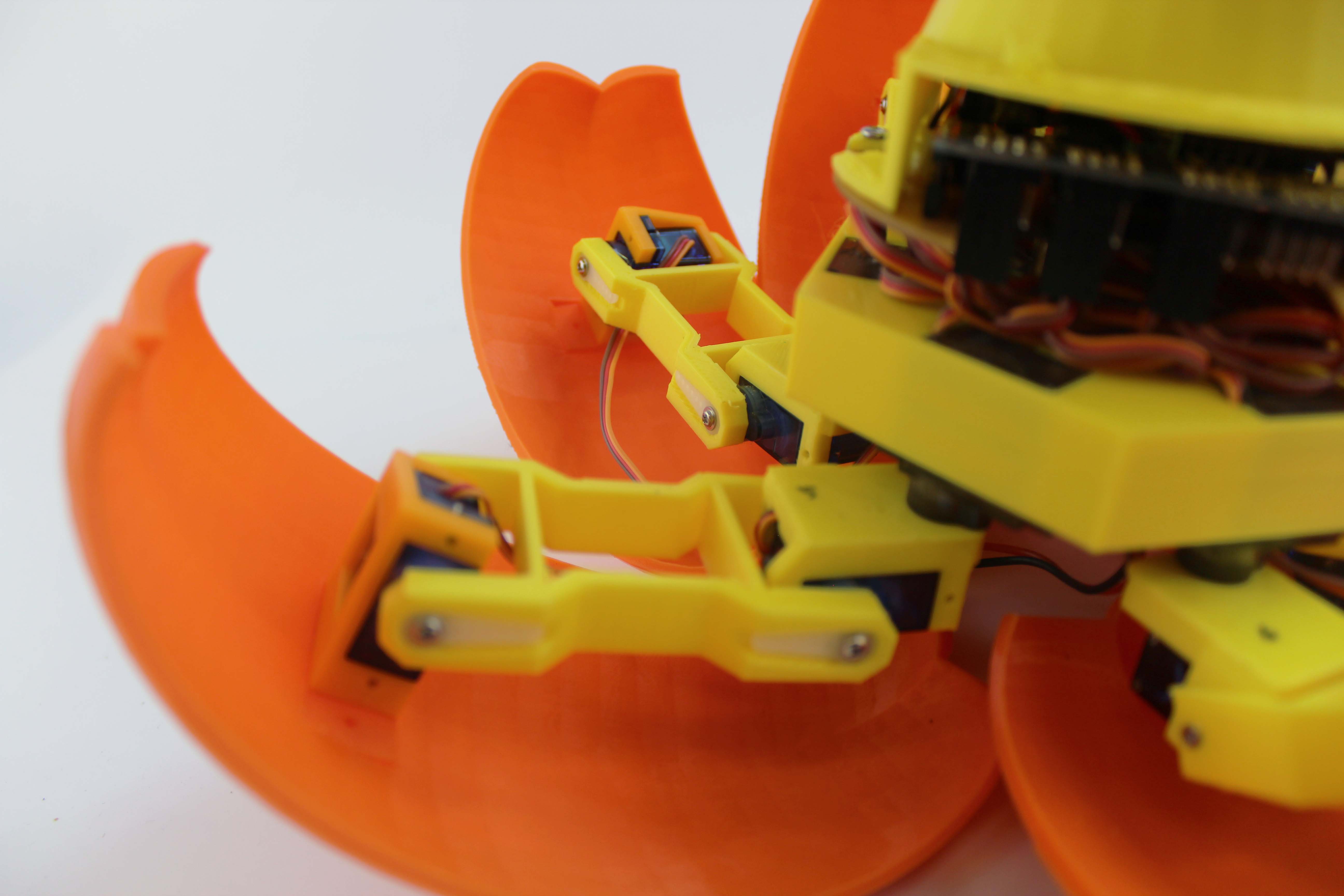
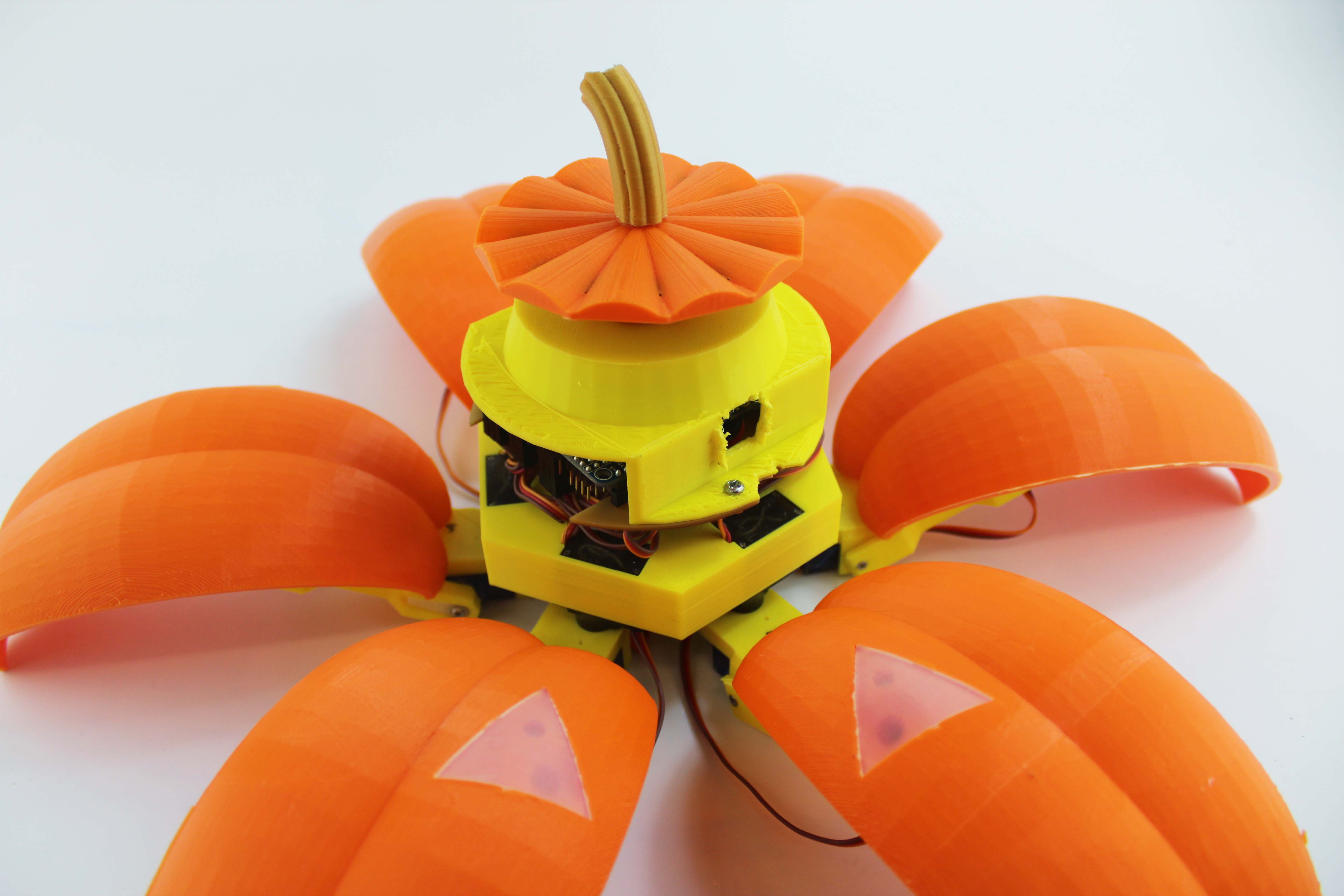
The outer structure of the pumpkin consists of 6 "pumpkin slices", each controlled by 3 micro-servos, and can seamlessly retract to the shape of a pumpkin. The entire structure is designed by me and 3d-printed in the university makerspace - including the transparent eye covers, which are printed on a Form 2 SLA printer.


Building Process
I started the building process by sketching on my ipad. After some preliminary brainstorming I moved to SolidWorks and started modeling a pumpkin based on my sketches. I then incorporated the inner structures, put everything inside the assembly, and went back-and-forth between the pumpkin slices and the assembly model to ensure a working retraction system. The complete CAD model can be found on GrabCAD

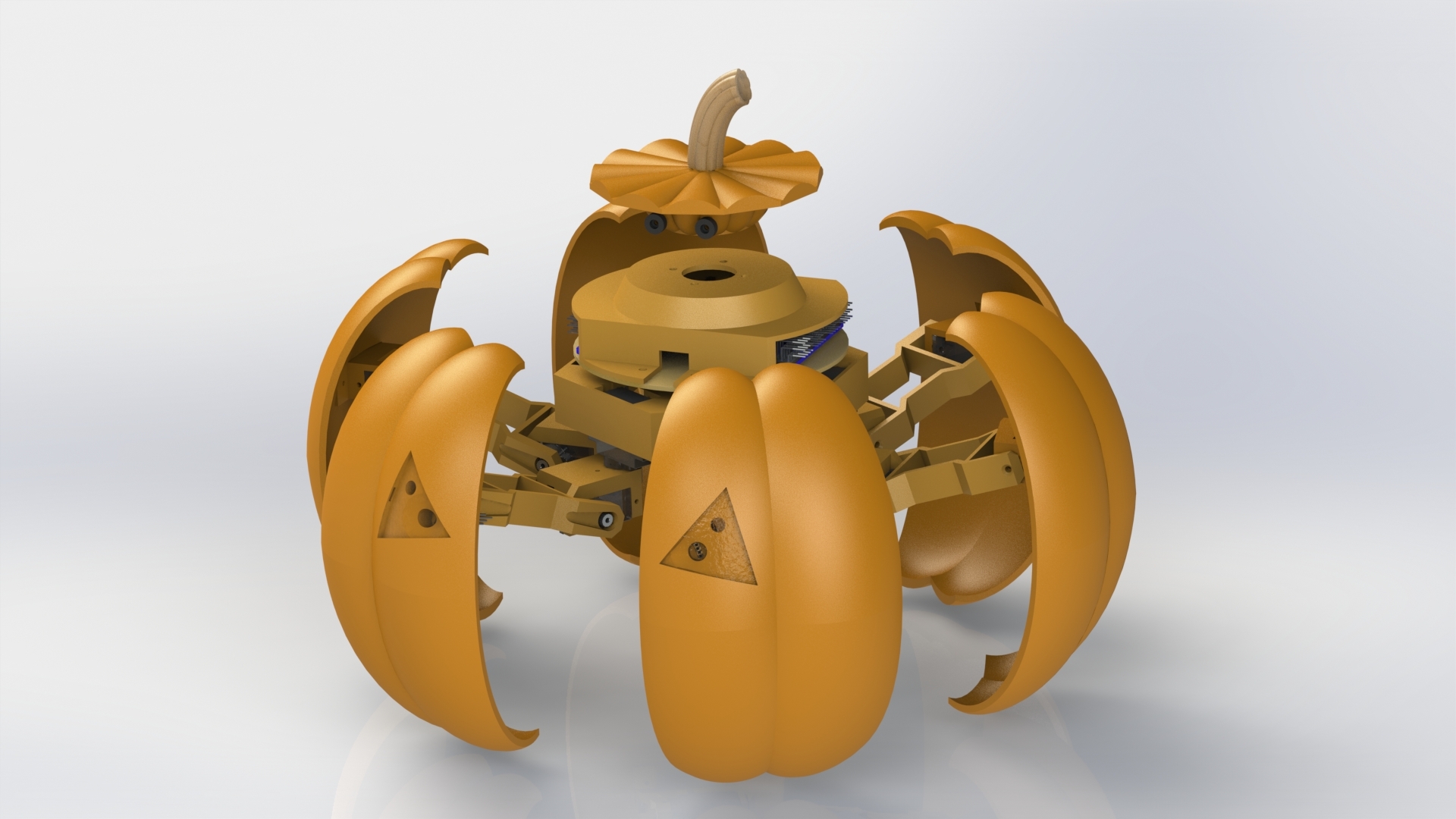
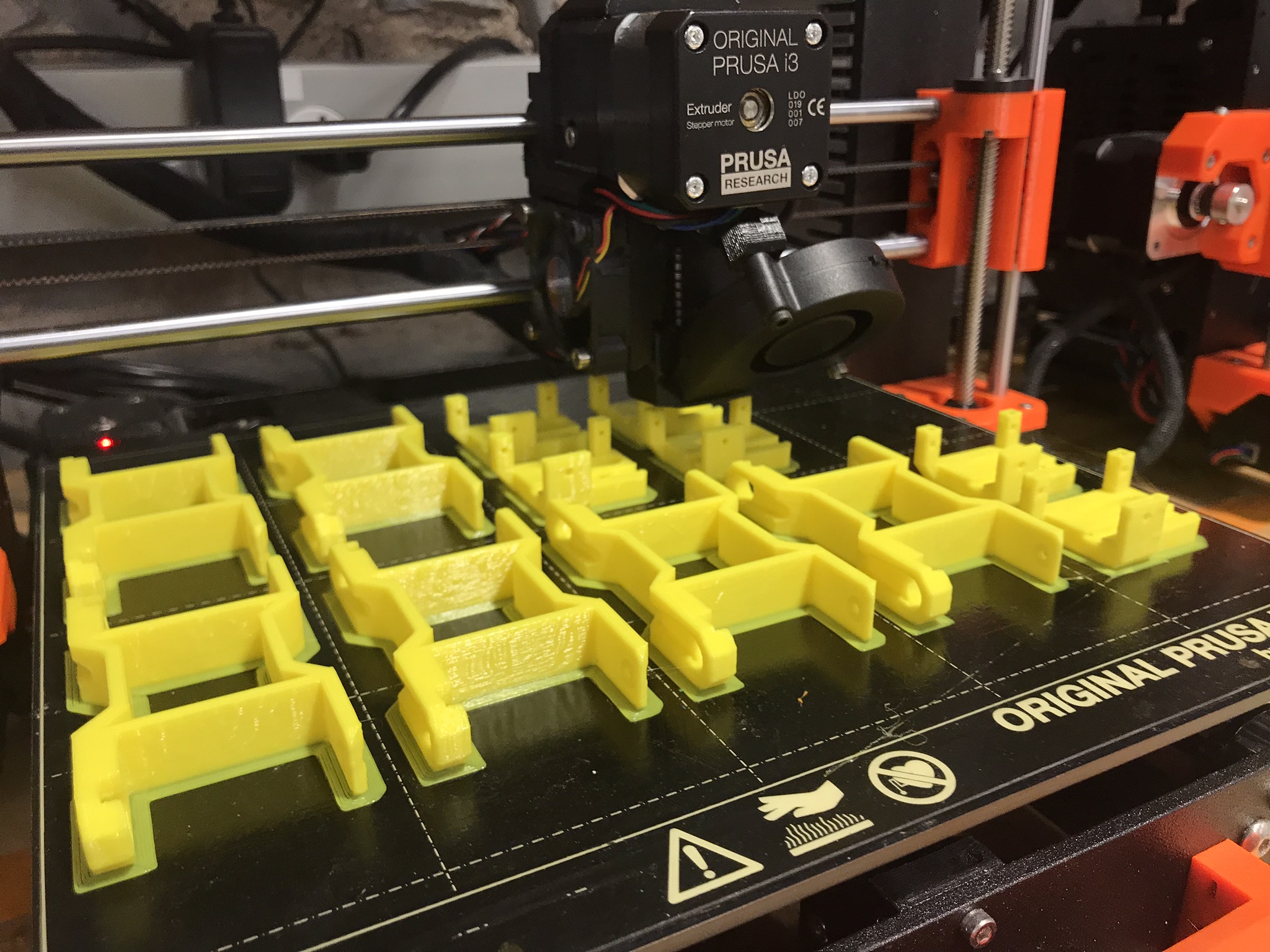
After designing the entire model in the computer, I started printing the parts on the Prusa I3 MK3S printers in Tufts Nolop Makerspace. Luckily, the professor running the makerspase has kindly ordered some orange and yellw filaments, so that I could actually make the color of my robot consistent with the festive atmosphere.
I also designed a printed circuit board, which iconnects my micro-controller (Adafruit Feather Hazzah) to the servo driver boards. I also put in special consideration to the user-friendliness by putting the "masterswitch" of the robot on top of the stem of the robot. This is a perfect place for the switch as it is easiy reachable and does not affect the overall look of the robot.