Hexapods - Previous Prototypes
I recently started building a simple hexapod robot as a personal project. My intention is to get a fundamental, thorough experience from designing to building a robot (this includes fabricating the structures, selecting and assembling circuit boards and servos, doing some programming on a microprocessor, basic IoT, etc.). This is an ongoing project, so I will be frequently updating the page.
The robot recently went on an article on Tufts Now that introduces the new makerspace at Tufts:
https://now.tufts.edu/articles/want-build-hexapod-robot-makerspace
First, a video that sums up my work:
Version 1
After some preliminary research online, I had a clearer sense what general shape do people's hexapods look like. Then, I started sketching out my design ideas. Some changes were made when I was actually CADing and 3D-printing the parts, including flipping the design upside-down doe leave spaces for circuits and power, cutting out a hole at the center of the acrylic plate to let servo wires go through, etc.

Hexapod Walked for the First Time
Version 2
Based on the first design, I added a second acrylic plate at the bottom, and I modifird the CAD design of the legs to increase their stability. The arduino board, servo driver, and the batteries are now placed securely on the robot, fixed by cable ties.
Robot in Action
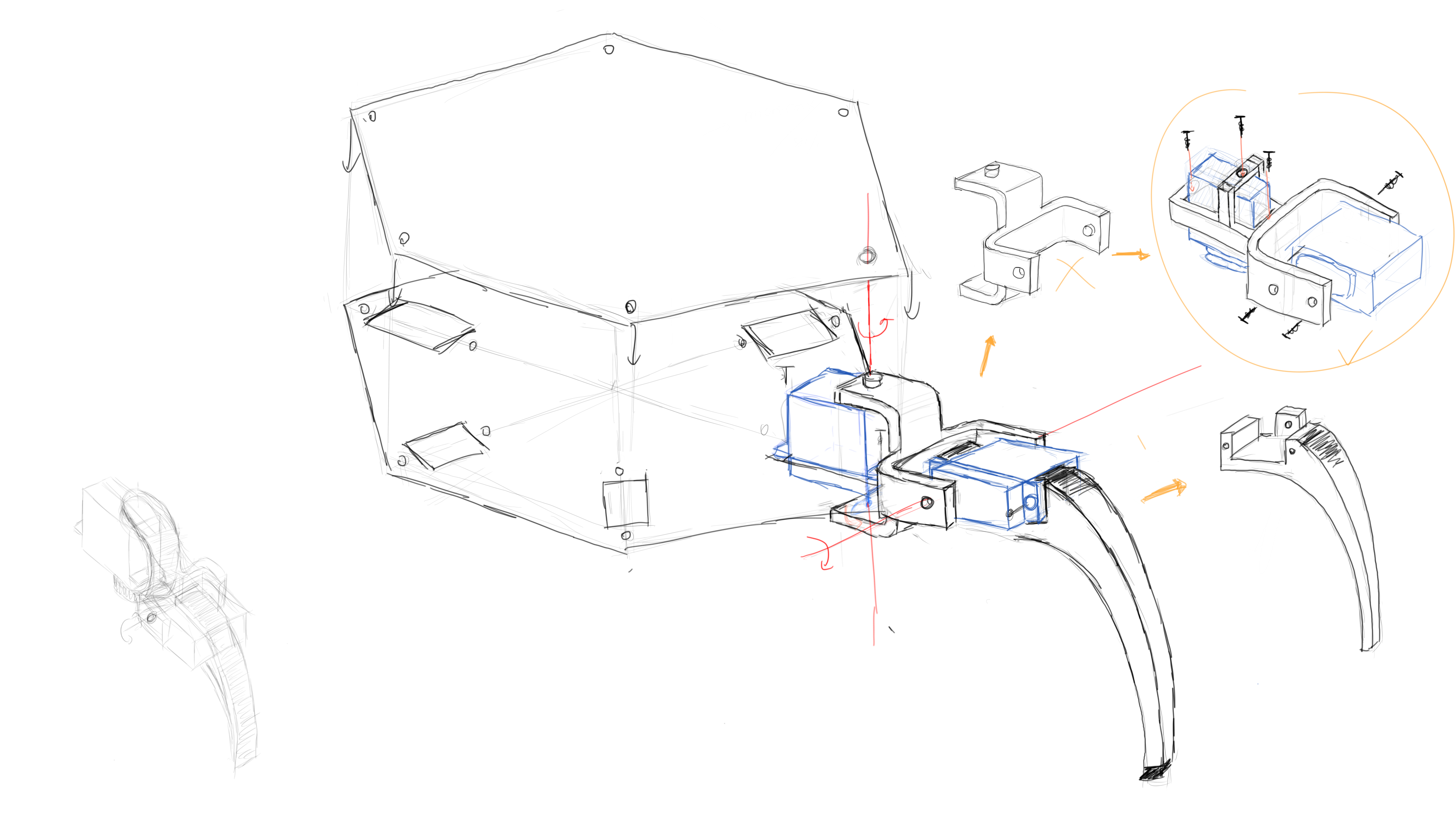
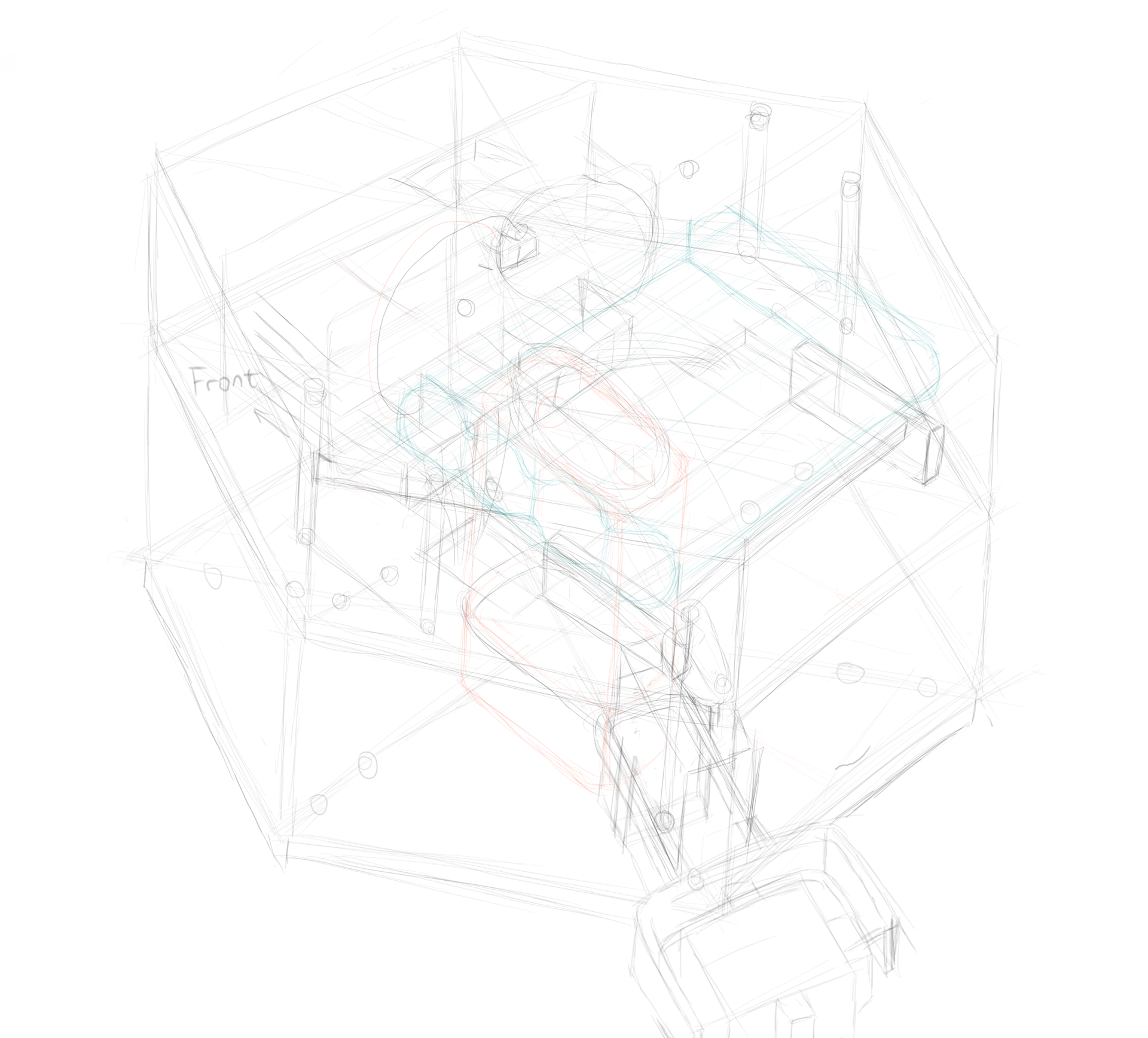
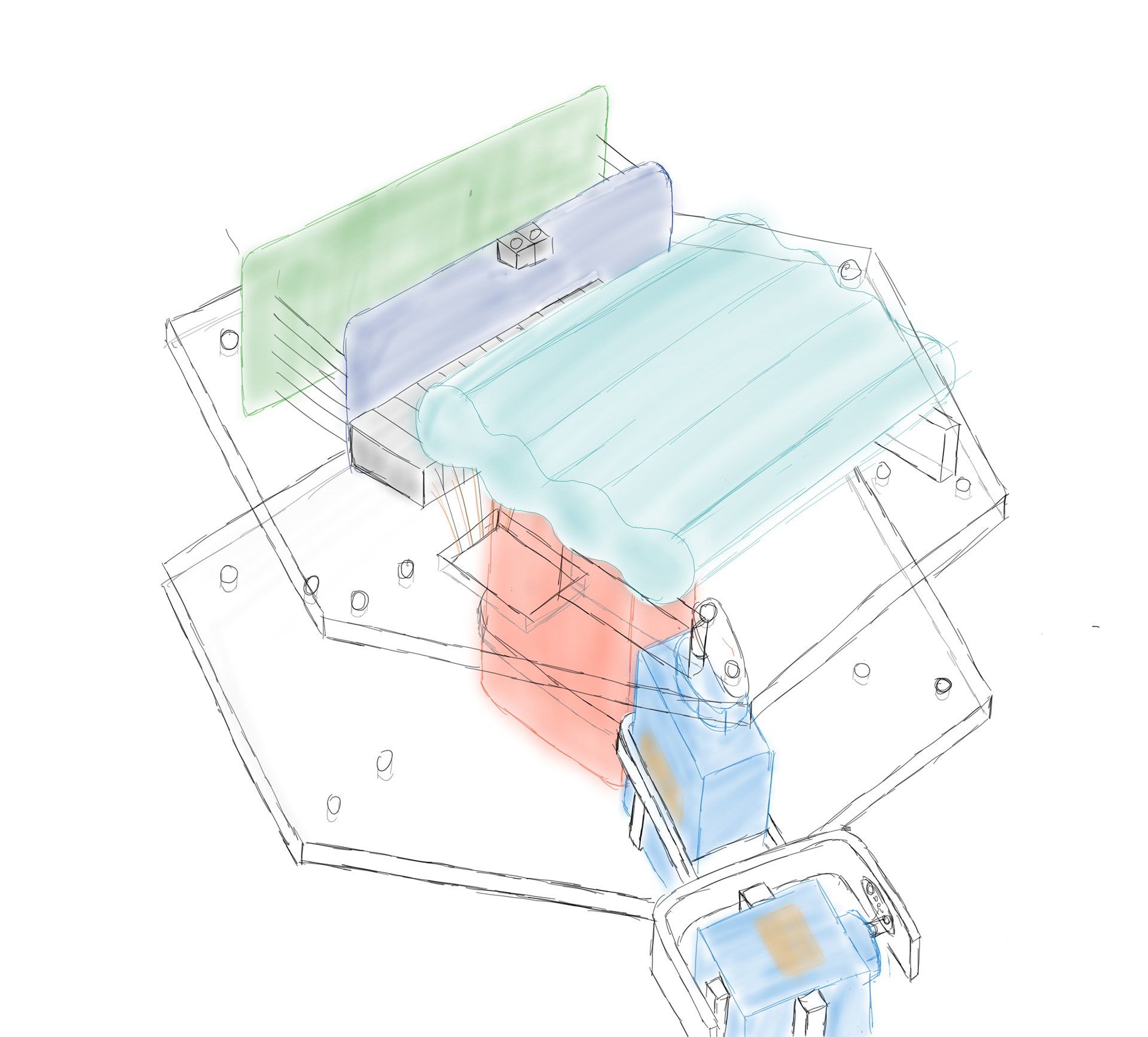
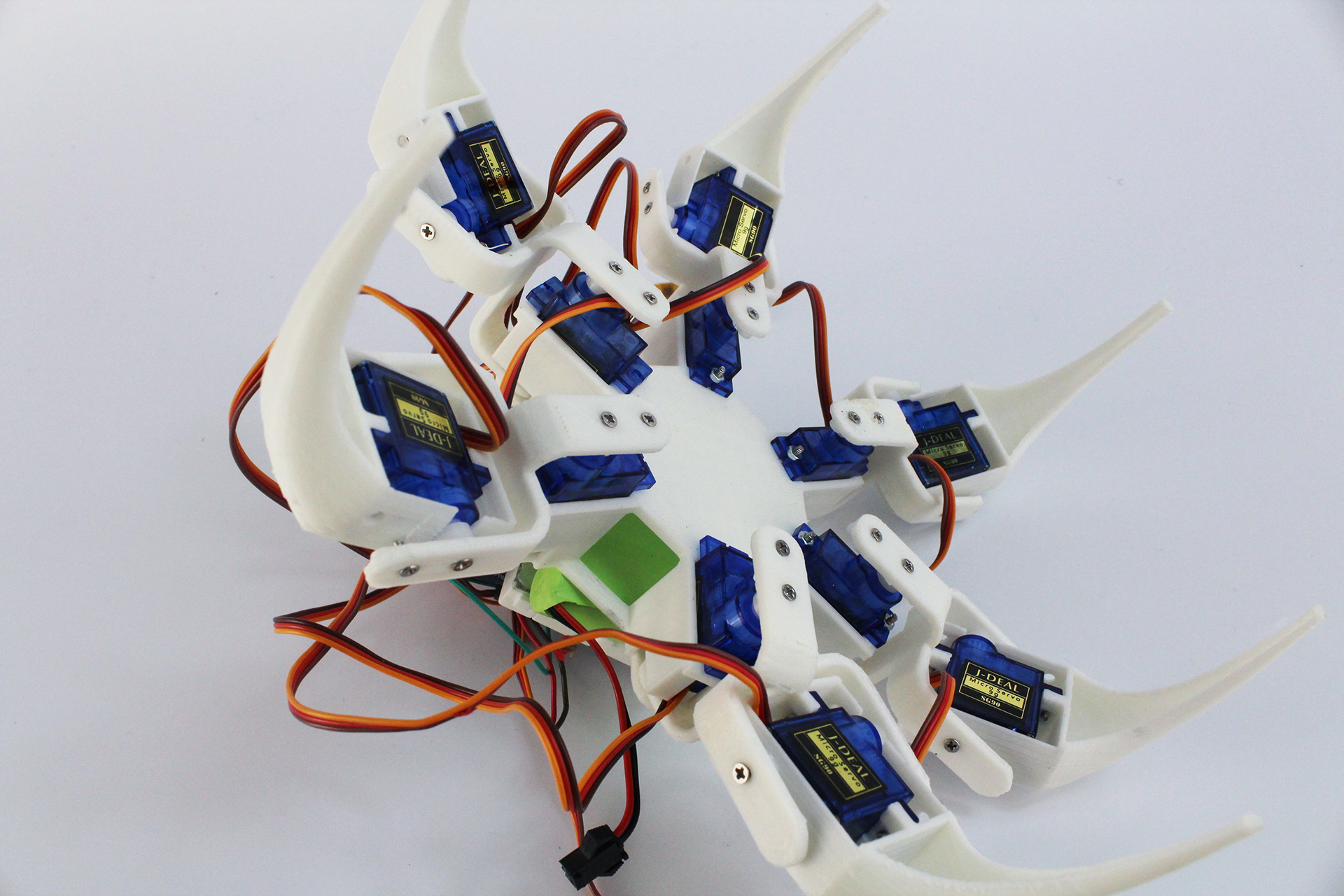
Version 3
In the new 3D-modeled leg and middle components, I incorporated the profile of the servo horns. This allows me to mount the 3D printed parts directly to servos without the need to use a screw.

Design Sketch
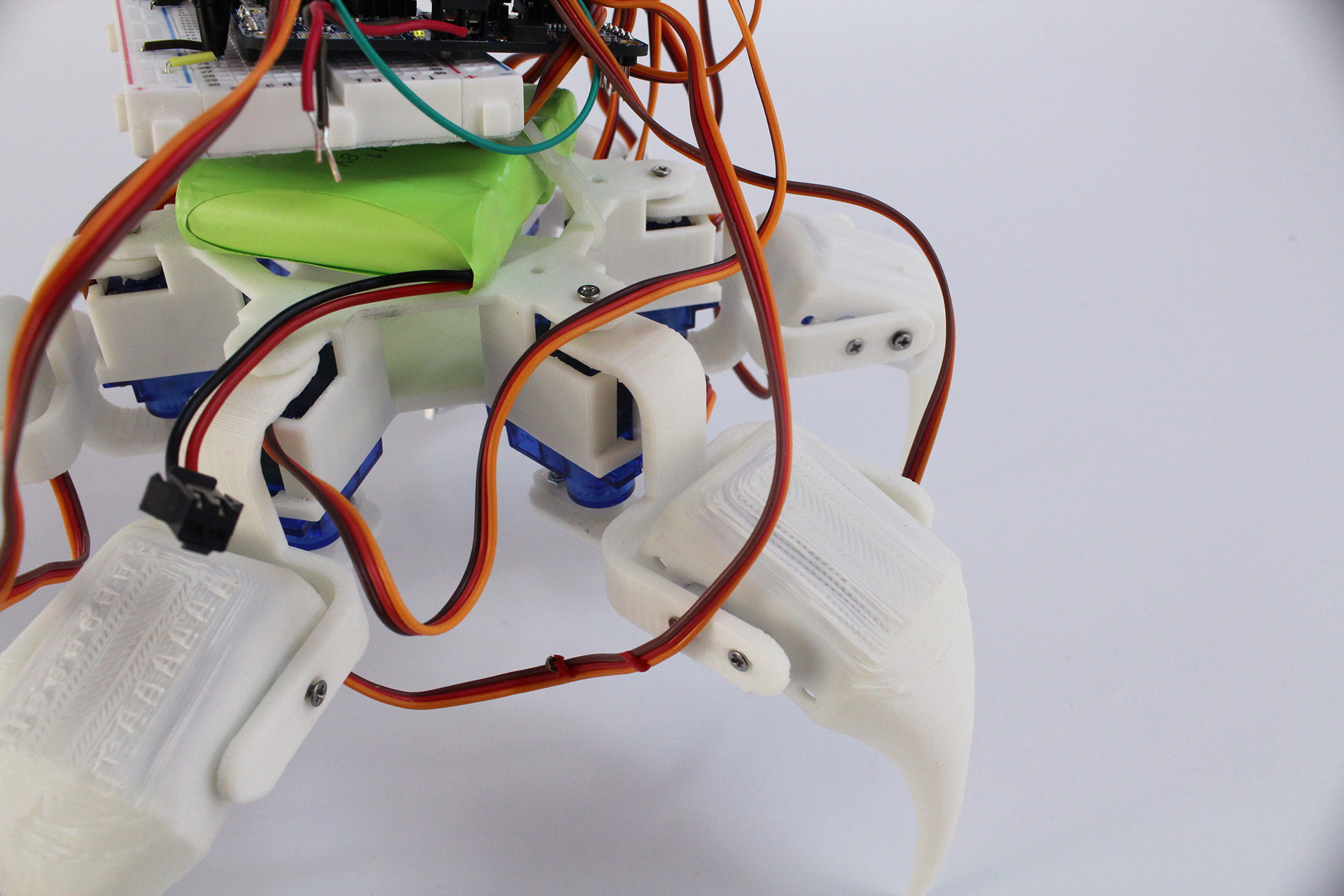
Version 3 Completed