Hexapod H1 Mini
I love tiny robots. This robot is more like a "branch off" from my "H" series hexapods - after finishing H1, I decided to build a similar robot but make it as small and compact as I possibly can. And here's the outcome: maximum width of 12cm (~4in) and a weight less than 120g (~4oz).
One of the biggest improvements I made on H2 compared to Version H1 is that I designed a hexagon-shape PCB that consists a servo driver (based on Adafruit's PCA9685 driver), power switches, battery ports, and pin headers to connect to the Adafruit Feather Hazzah, an IoT-ready development board I have been using since some of my previous prototypes.

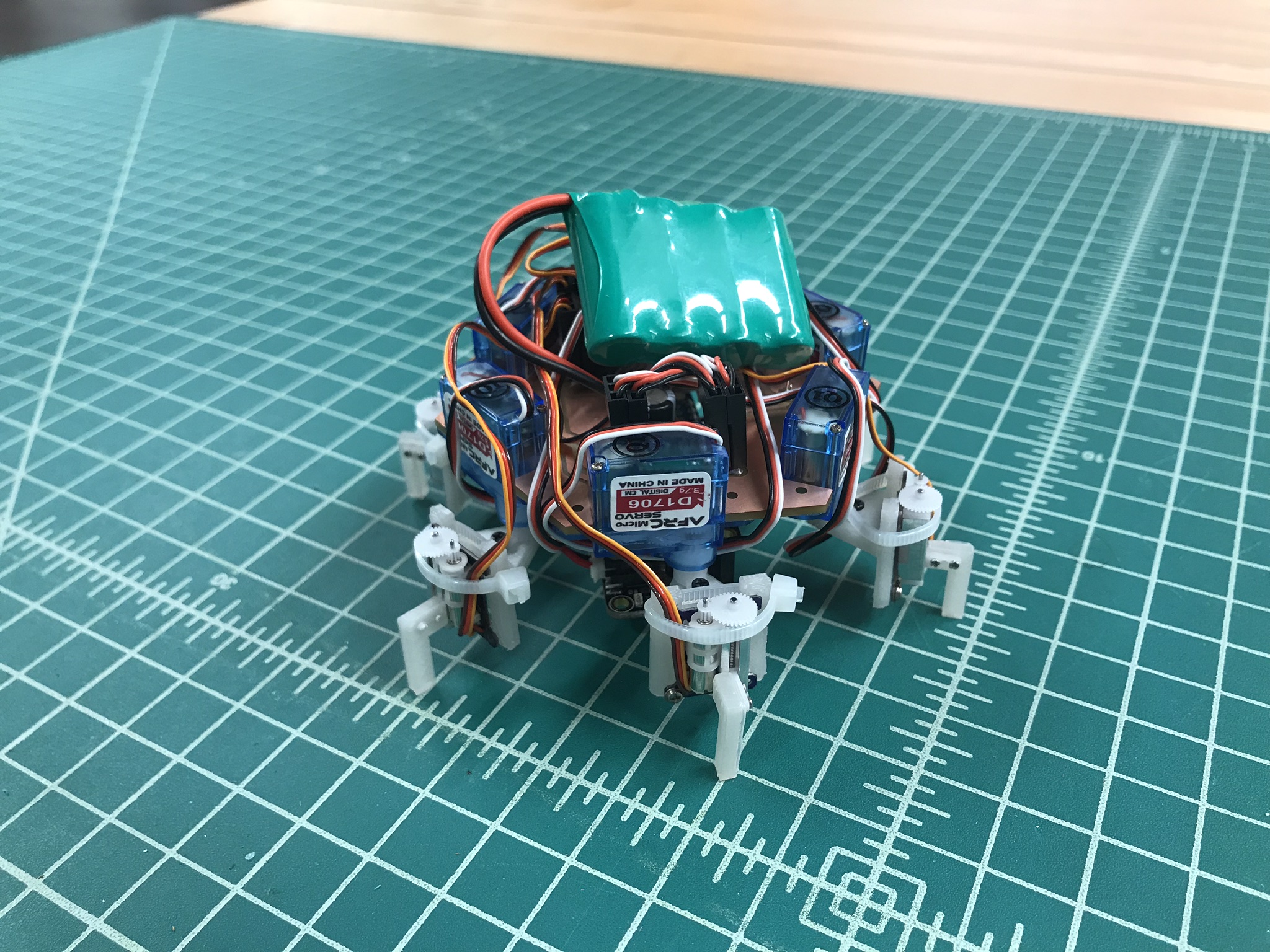


It works!
Sketching and Building
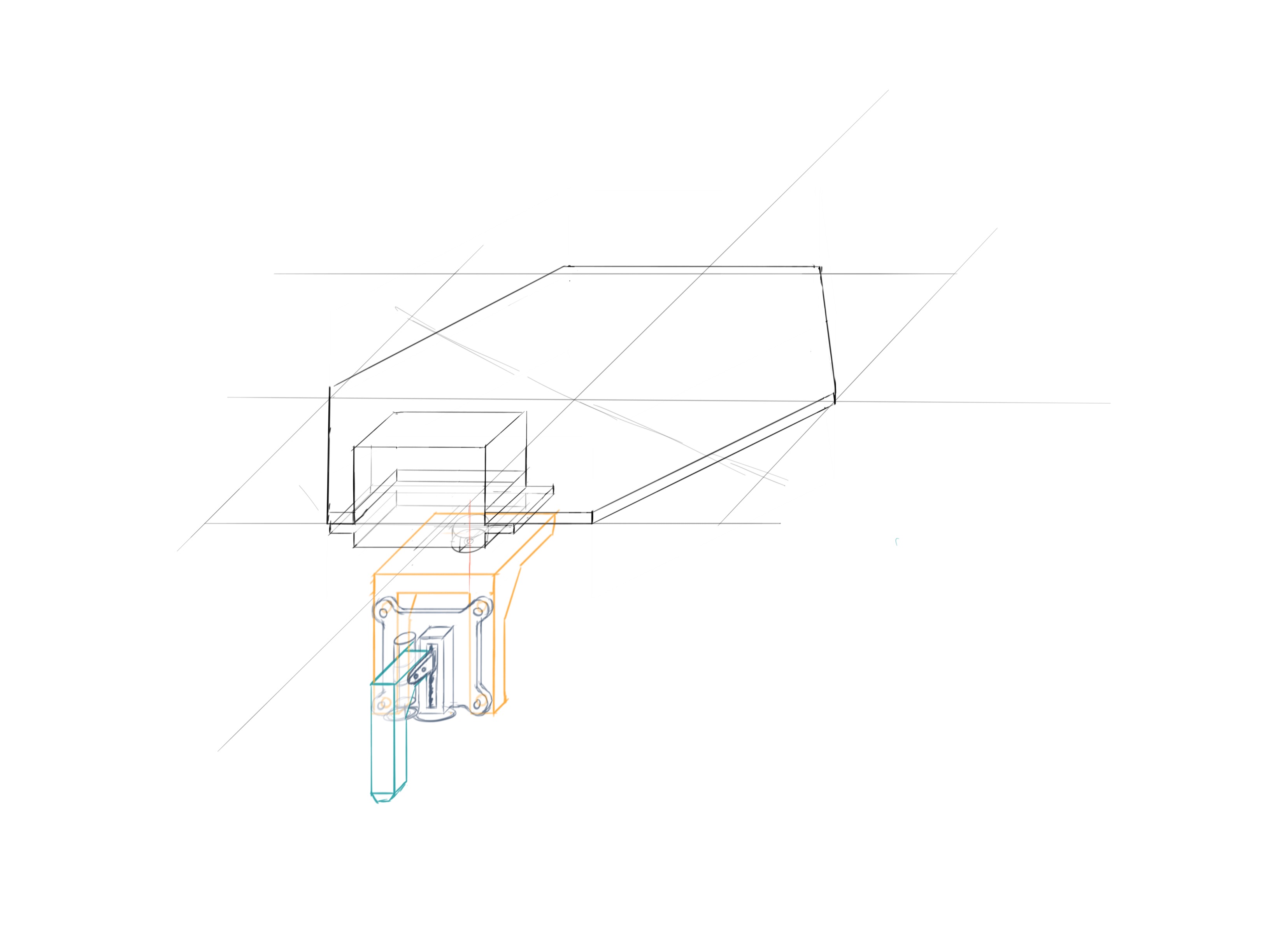
iPad sketch of connections between components.

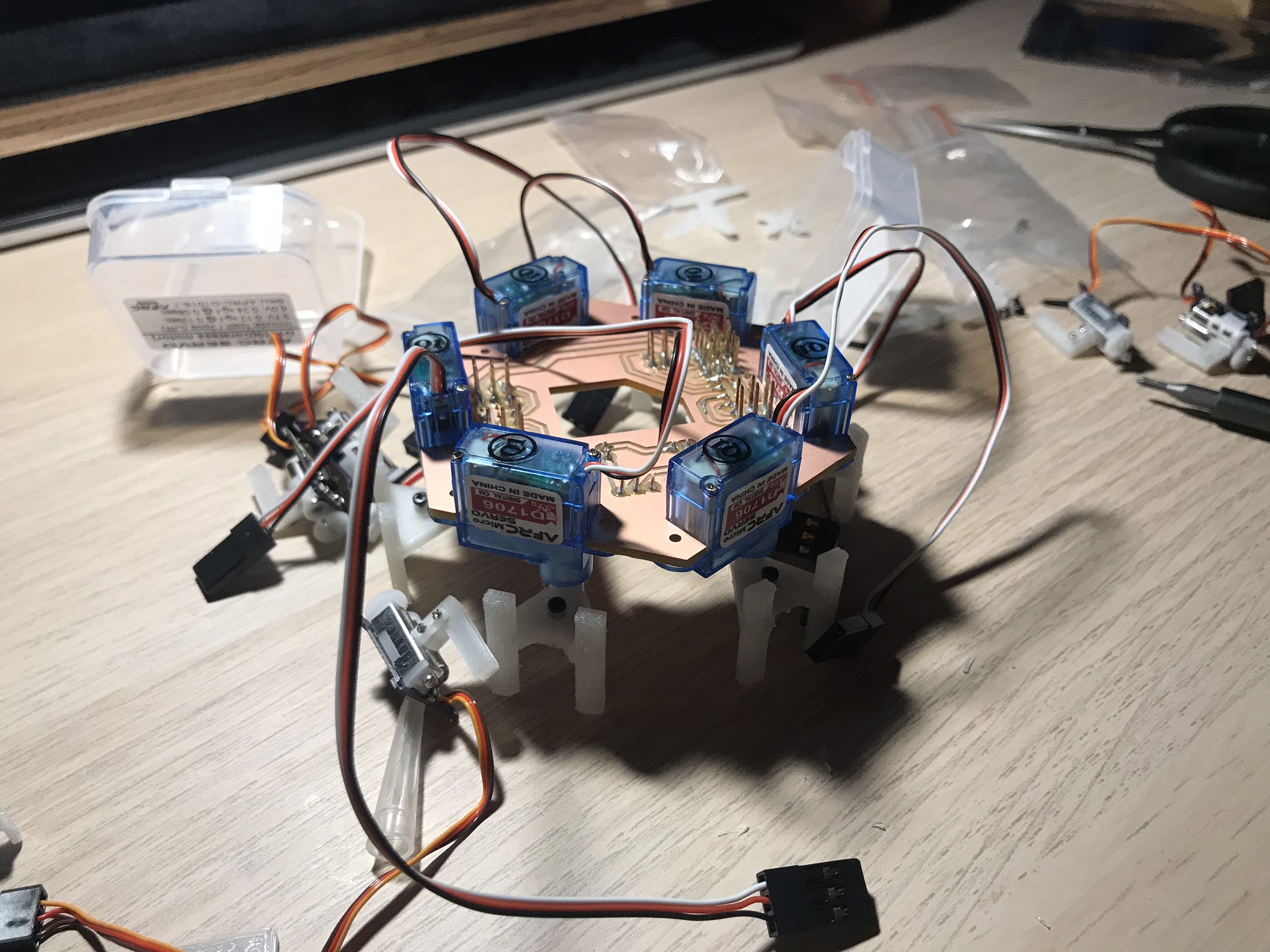
PCB which also acts as a mounting plate.
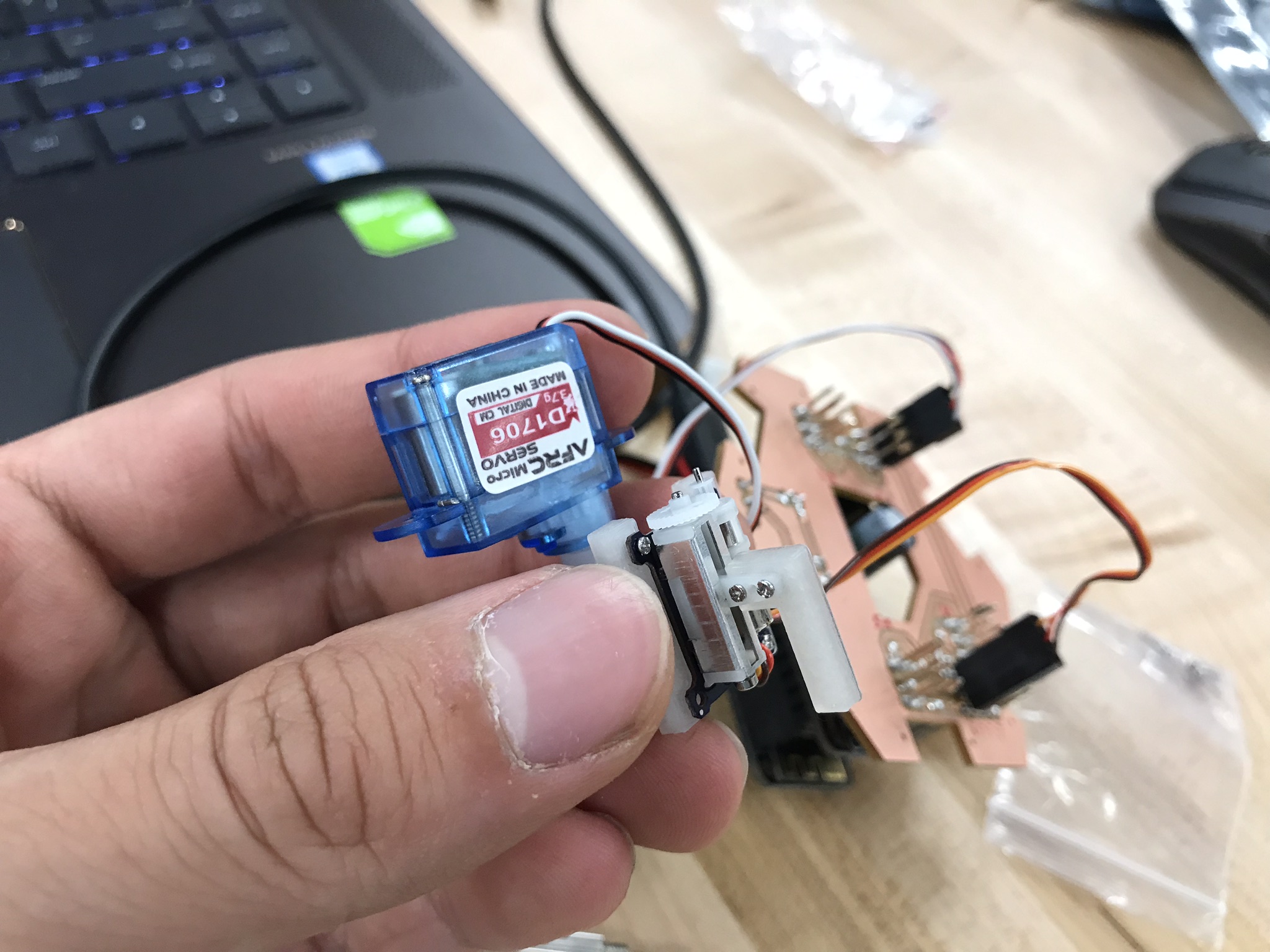
Servo test
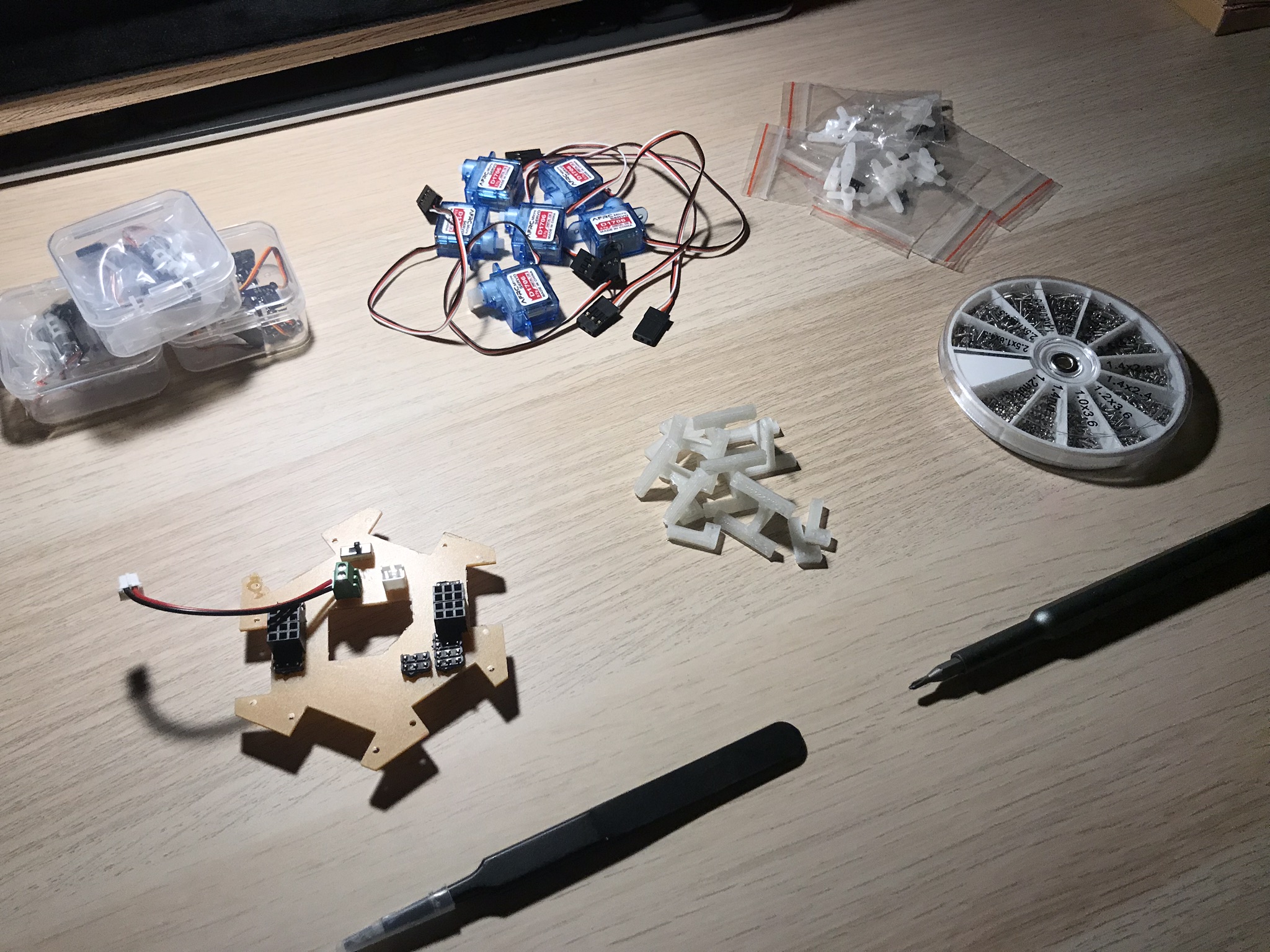
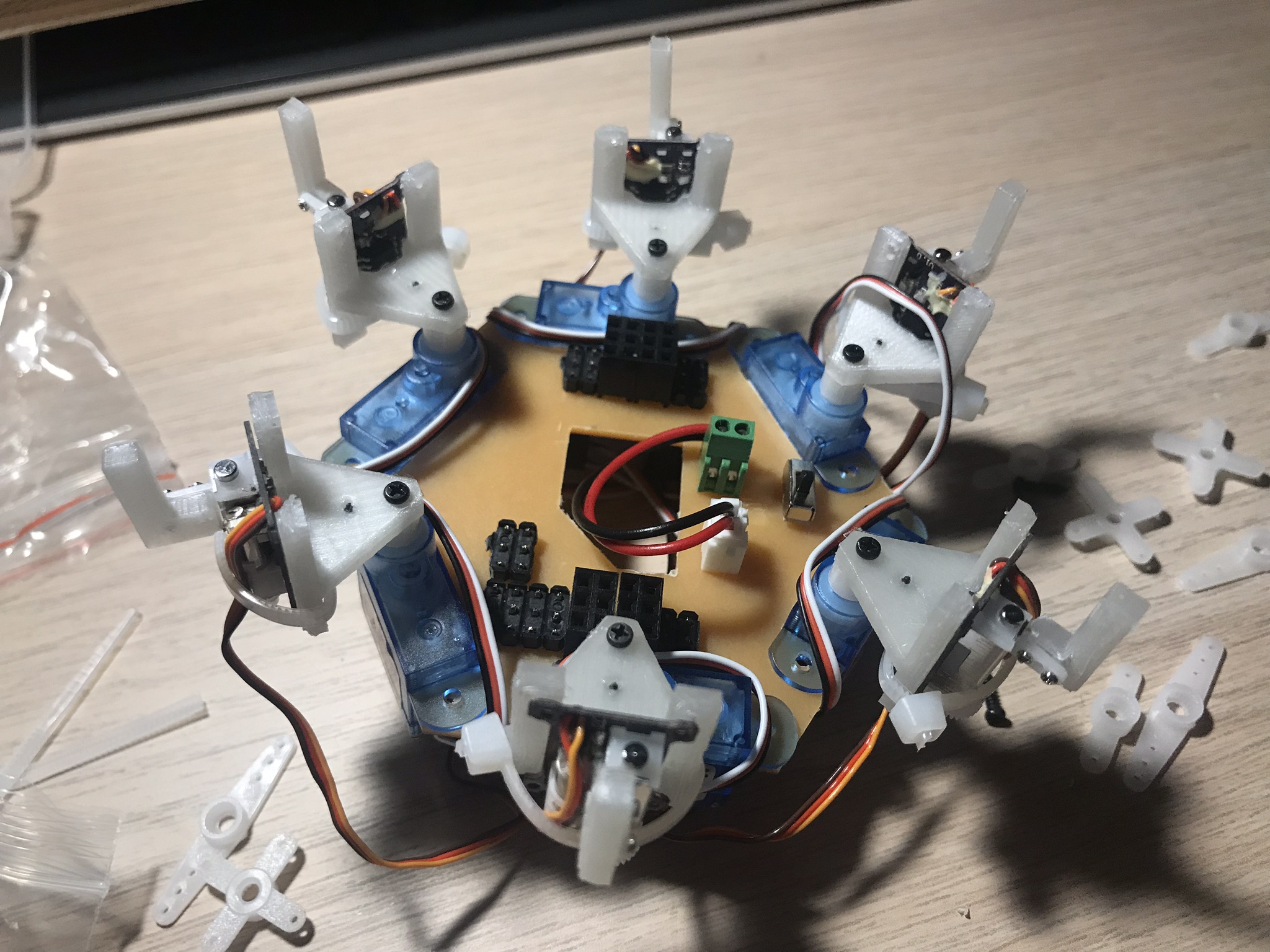

Assembled in less than 40 minutes