Syringe Control System
Spring 2020
In the Spring of 2020, I worked on developing developing a low-cost, modular pneumatic system for controlling soft robot actuators. In the end, I was able to present two fully functional syringe units being daisy-chained using I2C protocol. This research project is completely open-source, and I have already documented it in full detail in the GitHub repository. A complete handbook can be found here.
More than half of this project was done in my off campus housing during the pandemic. I would like to thank part-time lecturer Brandon Stafford from Tufts who kindly offered me to take one 3D printer from the school's makerspace to my house to continue working on the project.



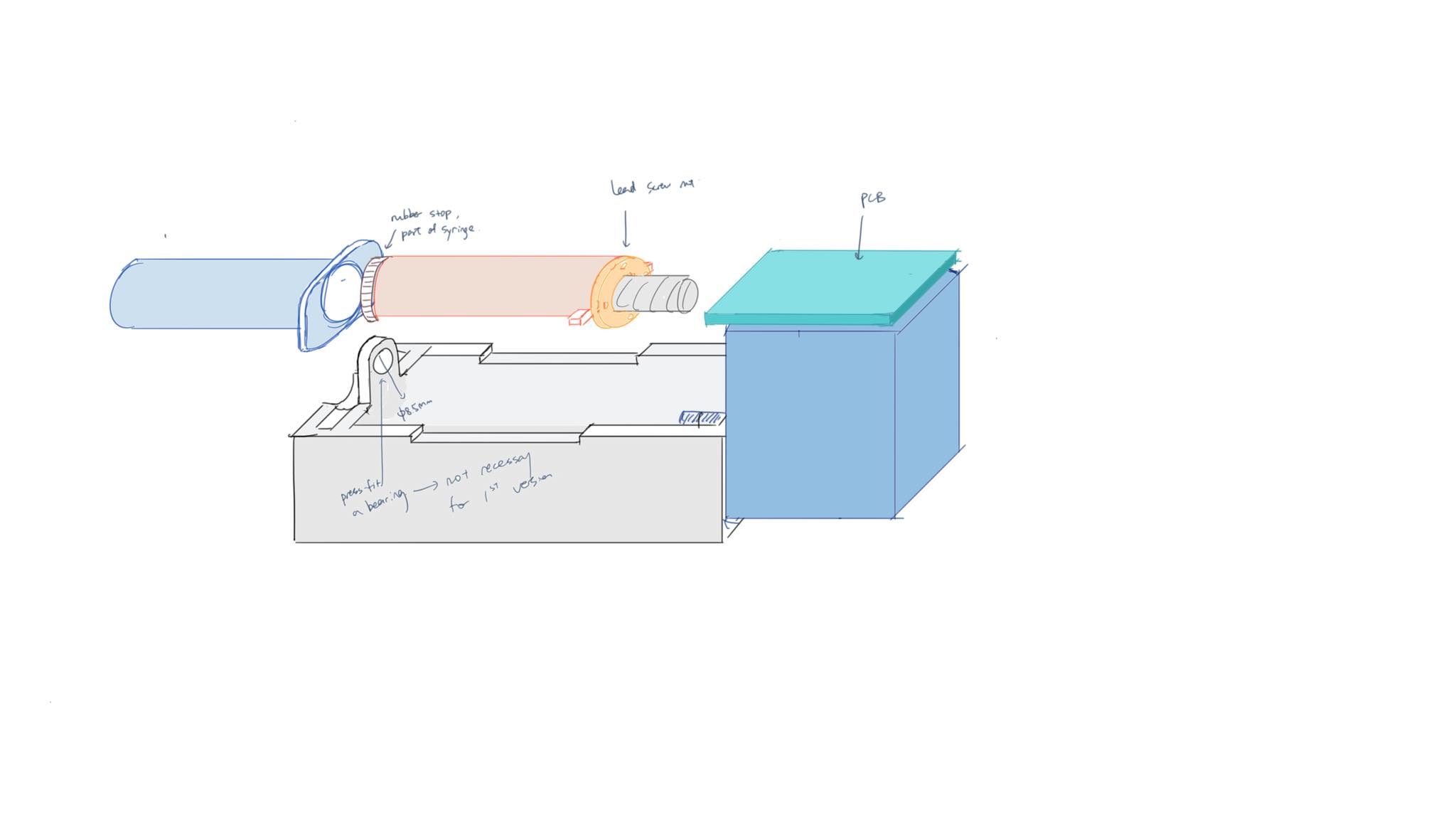


Design sketches and renderings
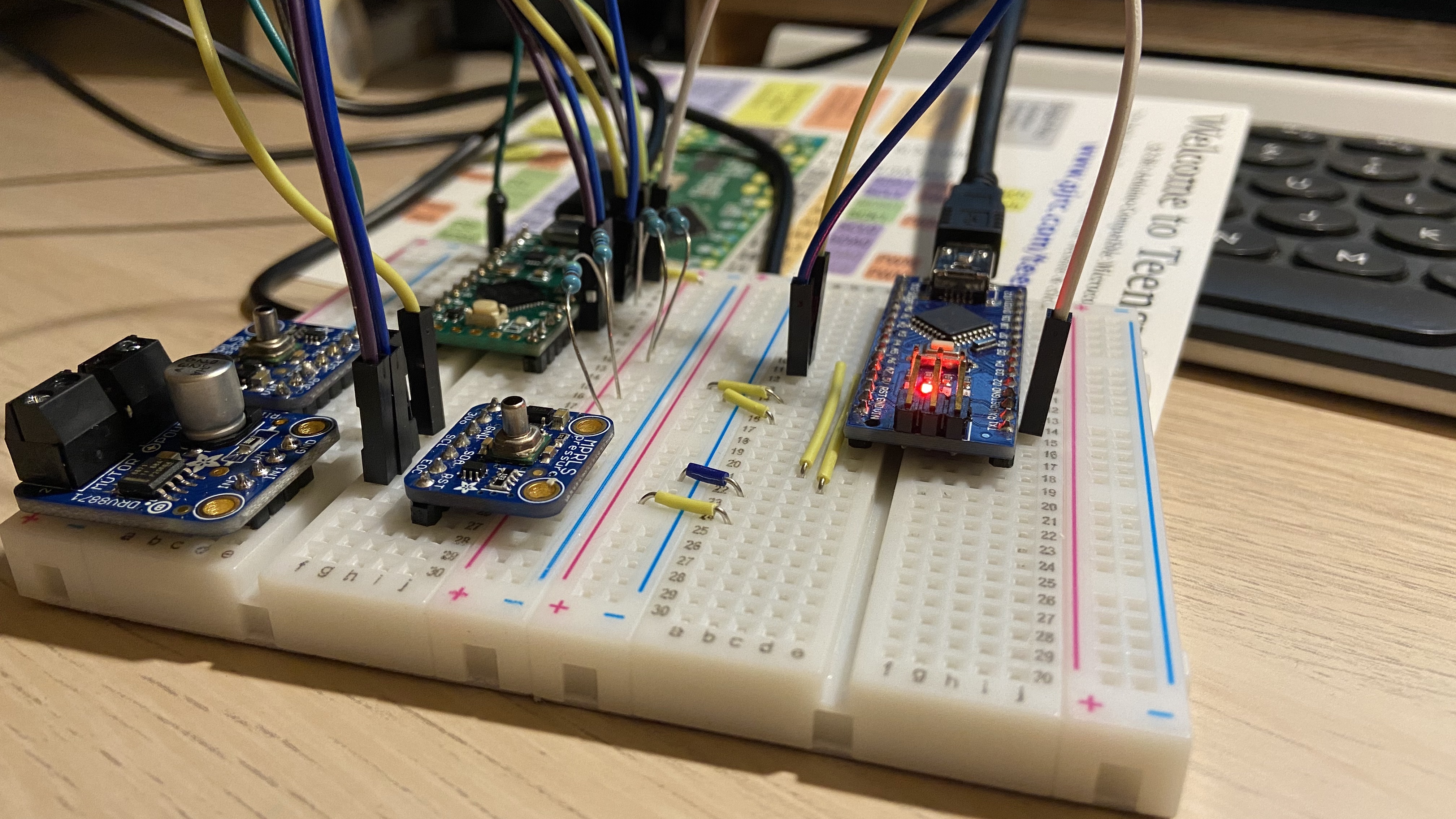
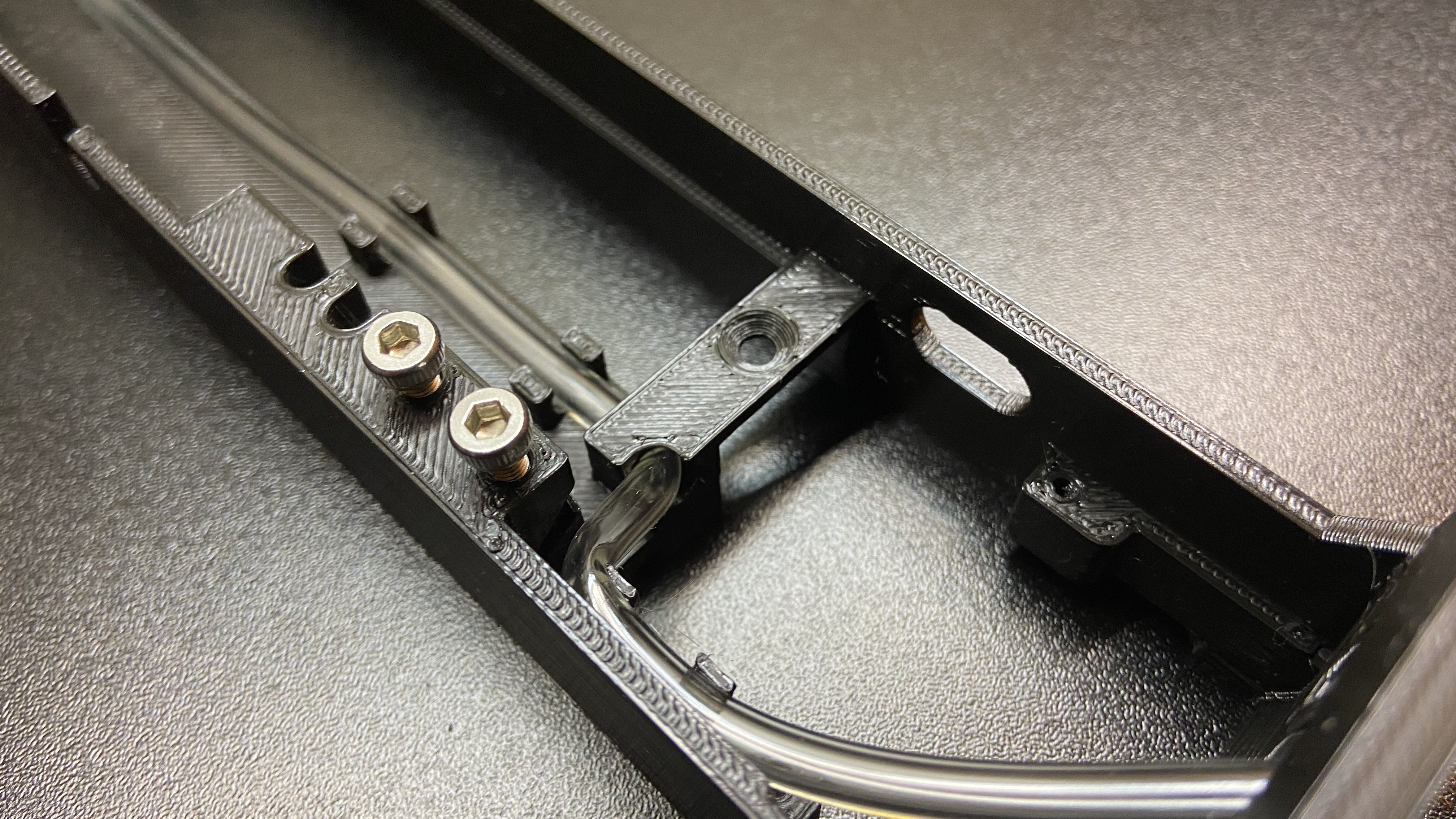
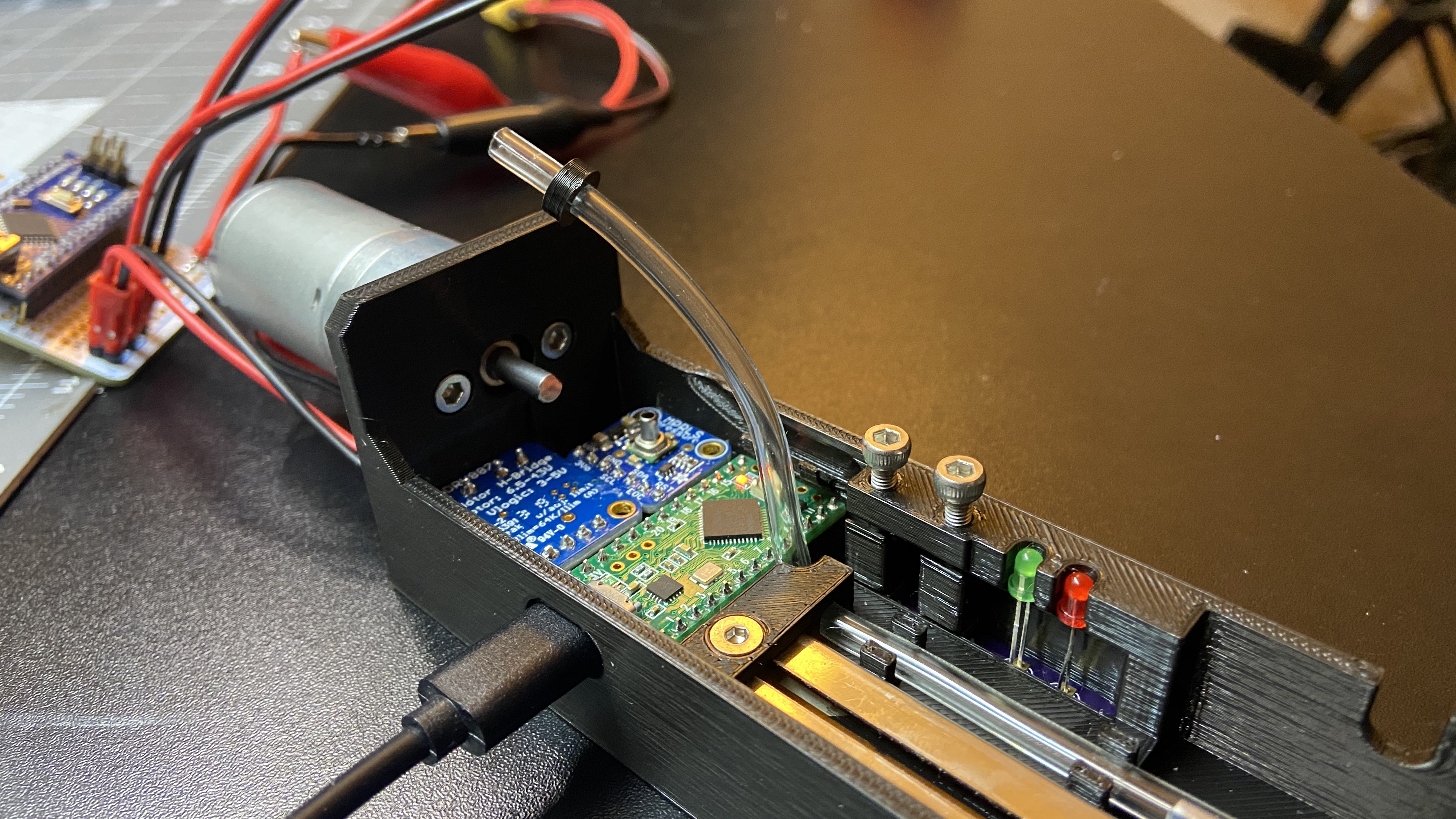
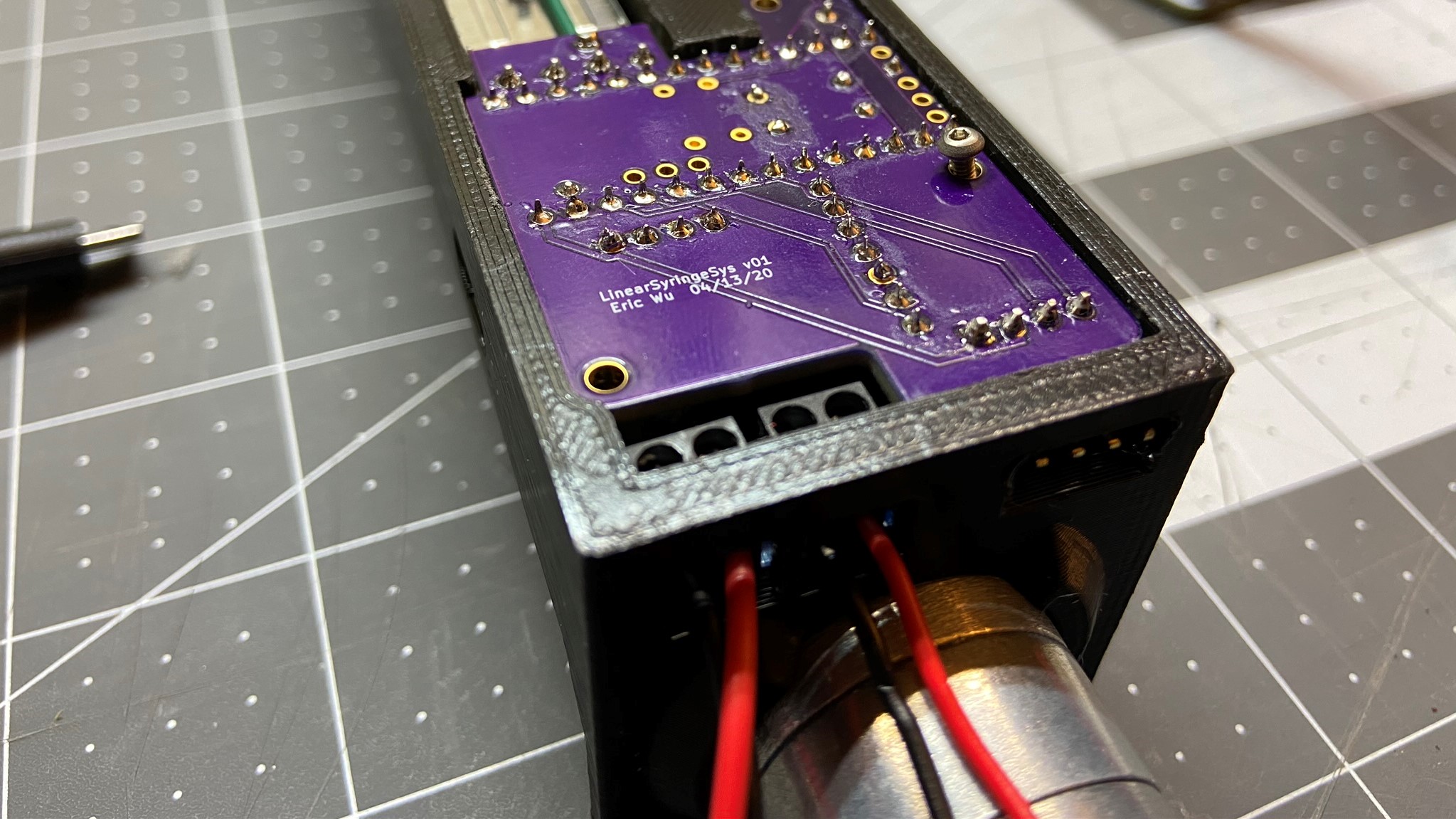
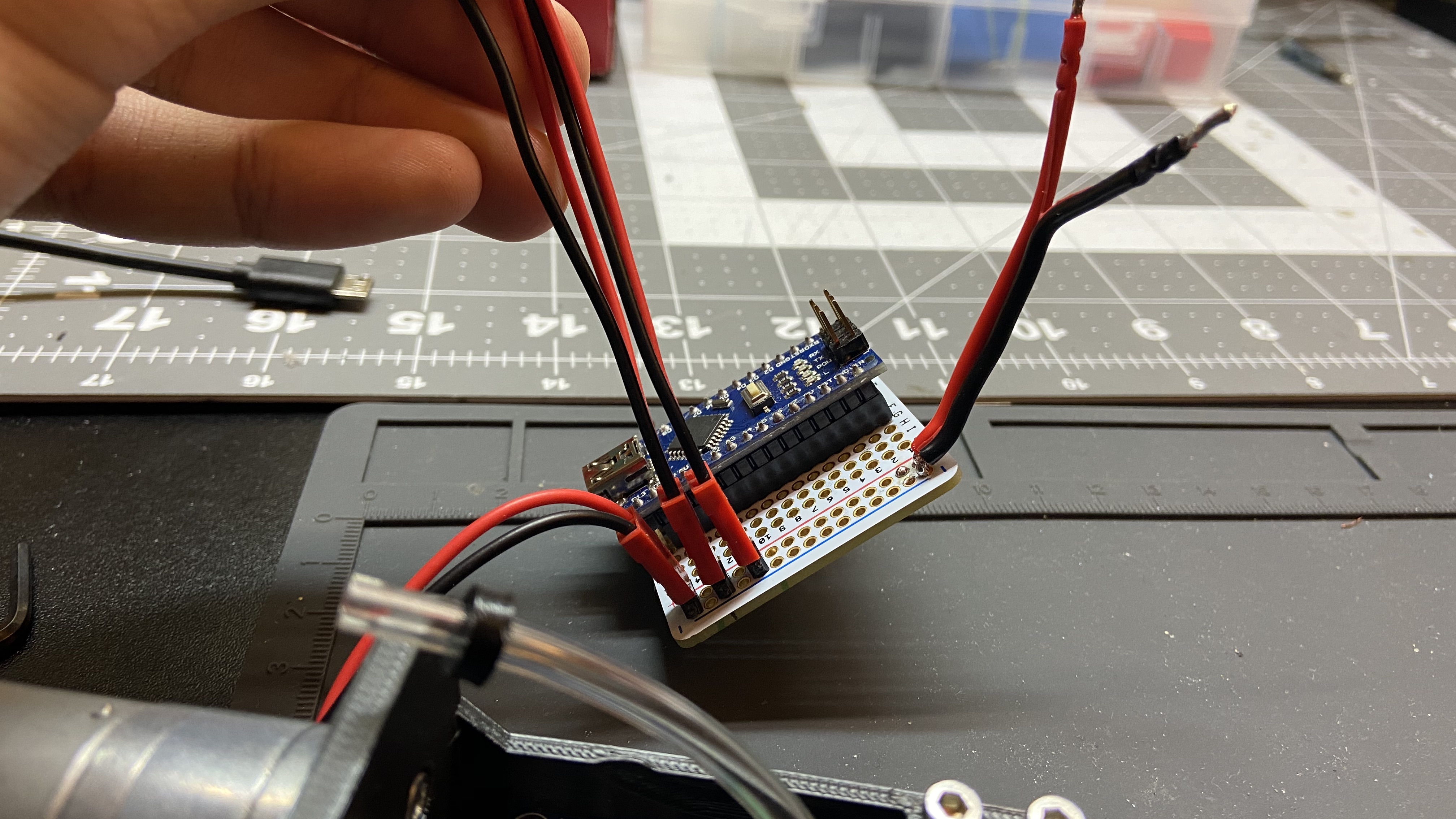
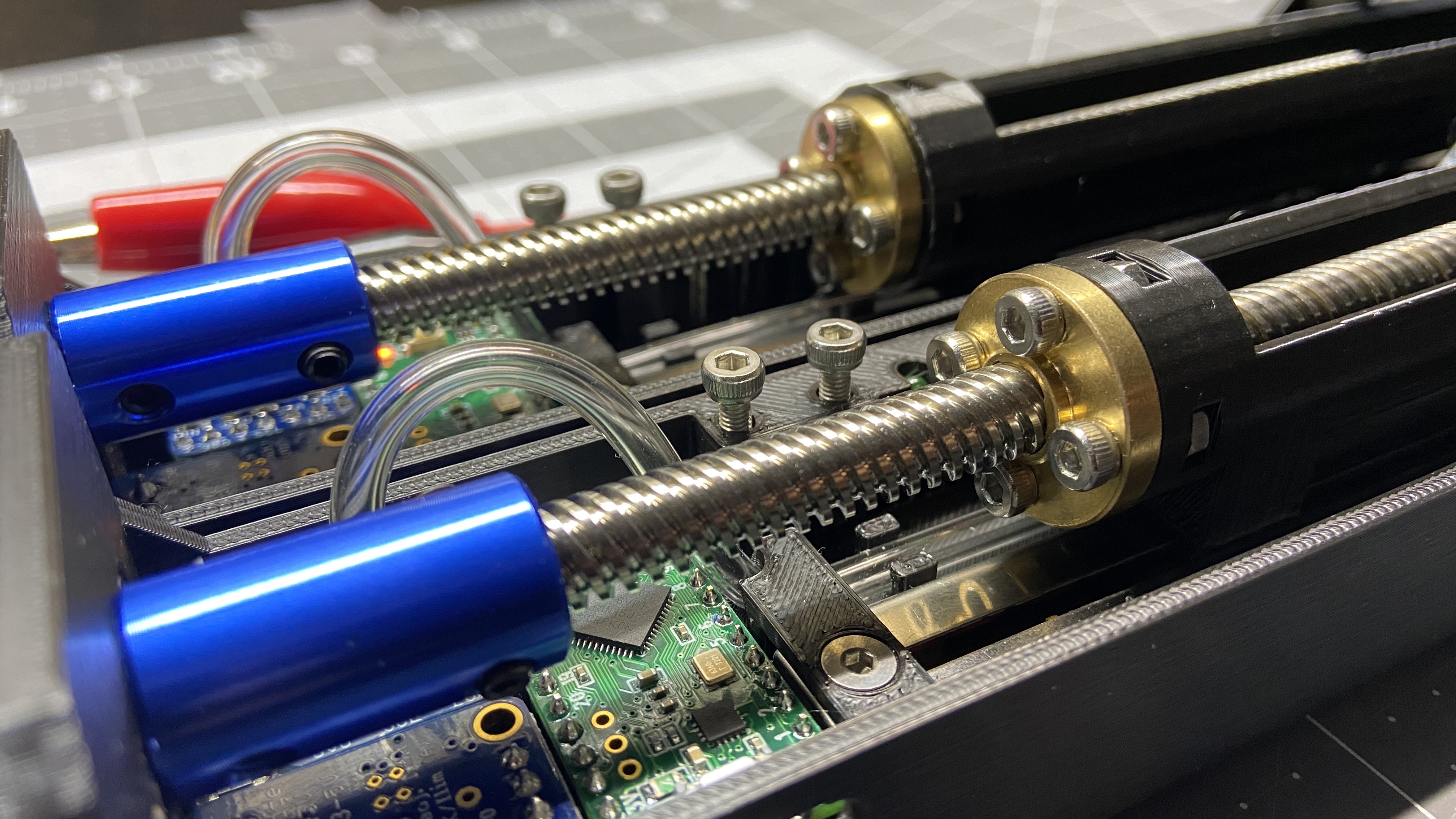
Prototyping