Silicone Soft Gripper
This is a silicone soft gripper cast from molds that can be made with any hobbyist 3d-printers - making it easily accessible to everyone. Because of its compliant nature of casted silicone, the gripper can handle anything from a plastic ball to a small water bottle. In the video, the gripper is powered by a large plastic syringe driven by human force, but it can also be easily integrated into various computer-control systems to perform tasks with high reliability.
The griper was made with Ecoflex 00-30, a silicone ruber that is commonly used in the field of soft robotics research. The molds are designed and manufactured at Tufts Nolop Makerspace.
By making more soft actuators like this, I hope to have a better understanding in the properties of robot actuators made from silicone elastomers, in order to collaborate with the usability test team later to come up with better hardware solutions to the exosuit project.
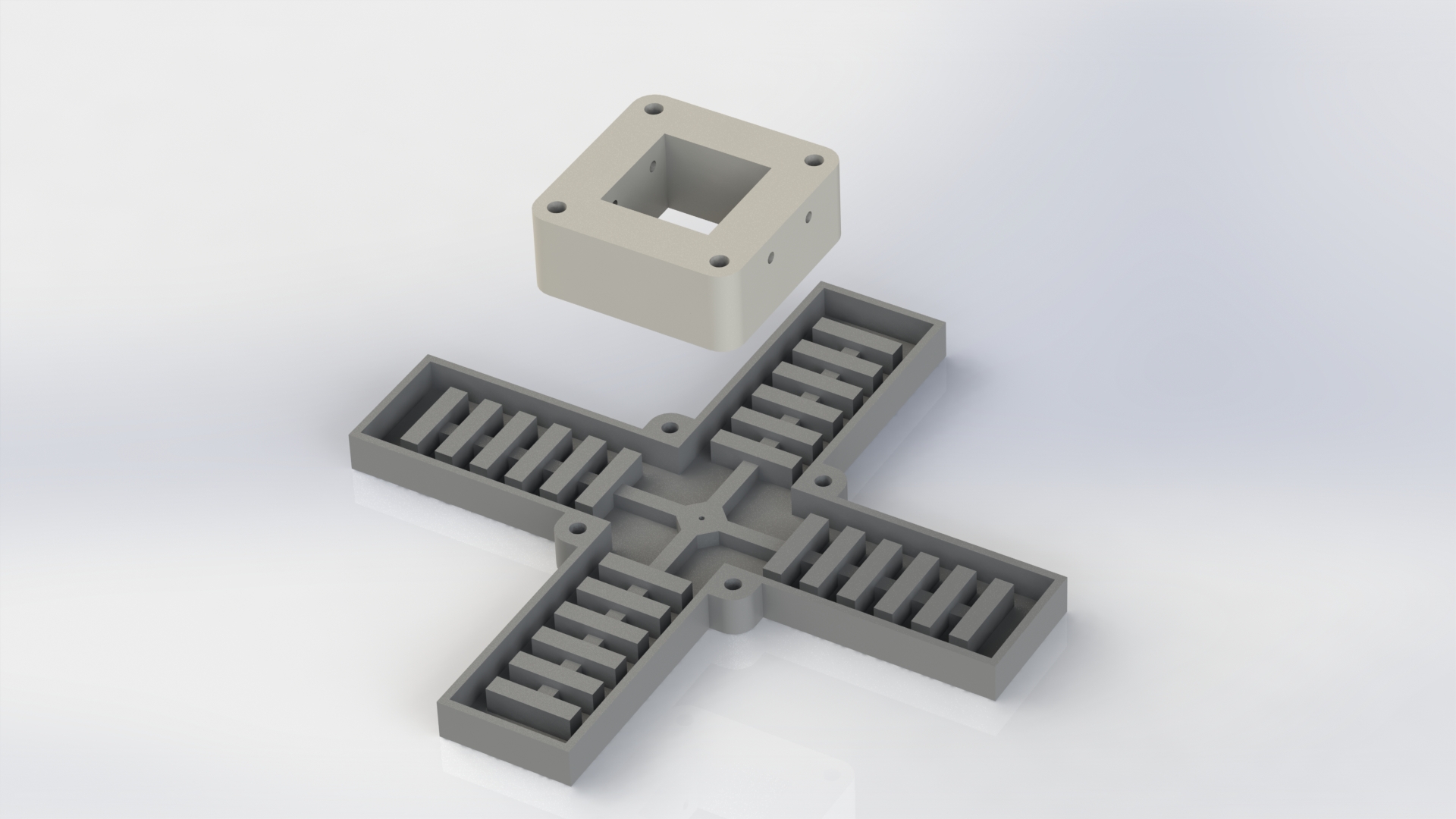
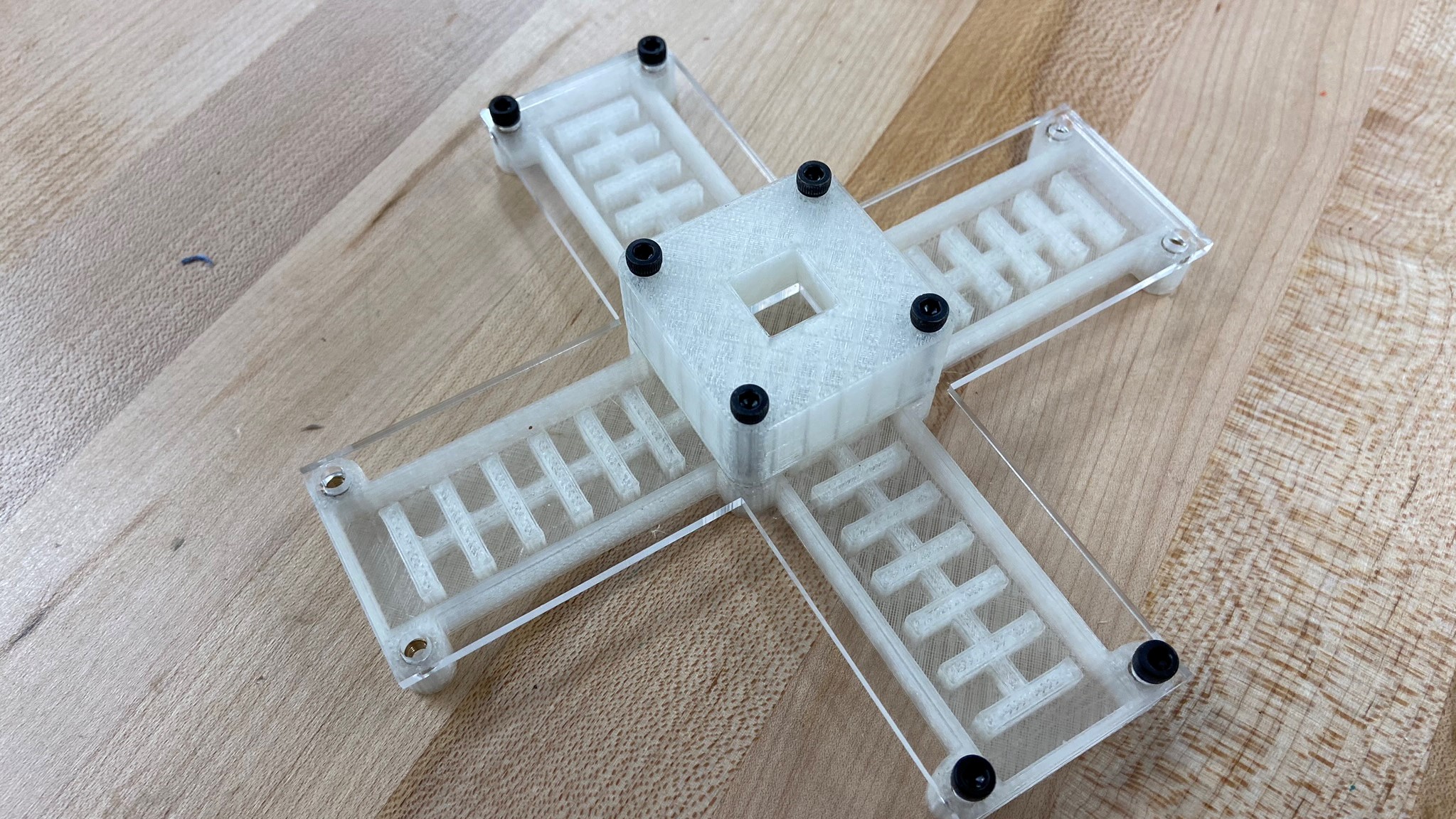
3D-printed mold (the latest version does not need the laser-cut acrylic piece :P)


More images