2019 Trinity Firefighter Robot
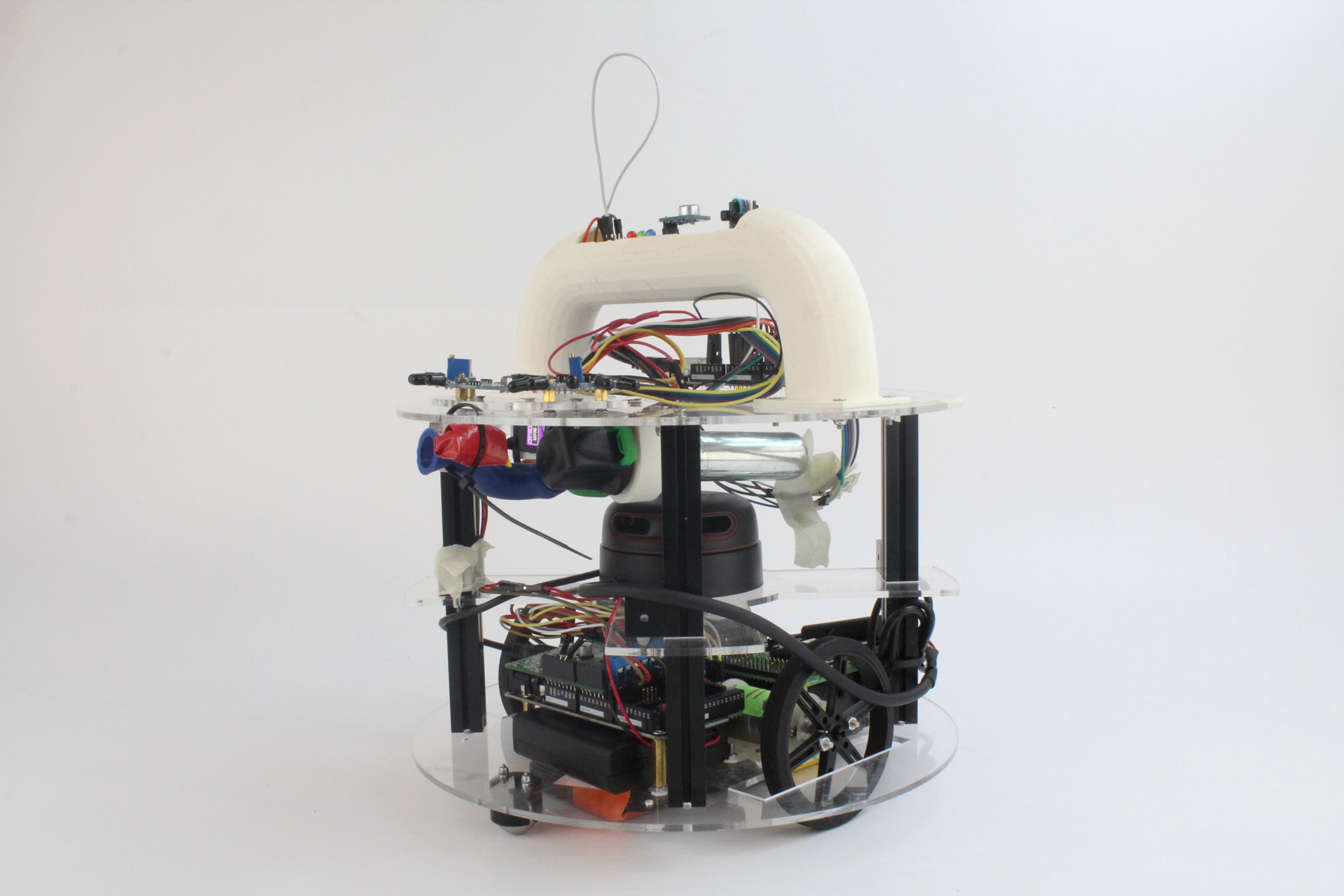
In April 2019, as a member of Tufts Robotics Club, I participated in the Trinity International Robot Contest, where we built a fully autonomous robot that navigates in a maze, identifies the location of fire (symbolized by a candle), and blows it out. The robot uses a Rplidar to create a map of the maze, and fire sensors to identify the location of the flame.
I lead group of 2 members and came up with a design that we believe can be customized and re-used in the future competitions. The idea is to have multiple layers of the robot designed individually, with universal connection method made possible by MakerBeams. As the hardware team lead, I first spent time with the team and decided on the specific parameters of the connecting method, and we broke into sub-groups to speed up the design process; after that, I gathered all the design, combined them into a big assembly, and fabricated the whole structure with the team. It took a couple of iterations for each part of the components before we settled for the final robot, but the modular nature of the system really helped speed up the prototyping process.
Shown below is the complete Solidworks assembly (we designed all the components except the motor, the Raspberry Pi, the lidar, and the Arduino, which we obtained from GrabCAD).
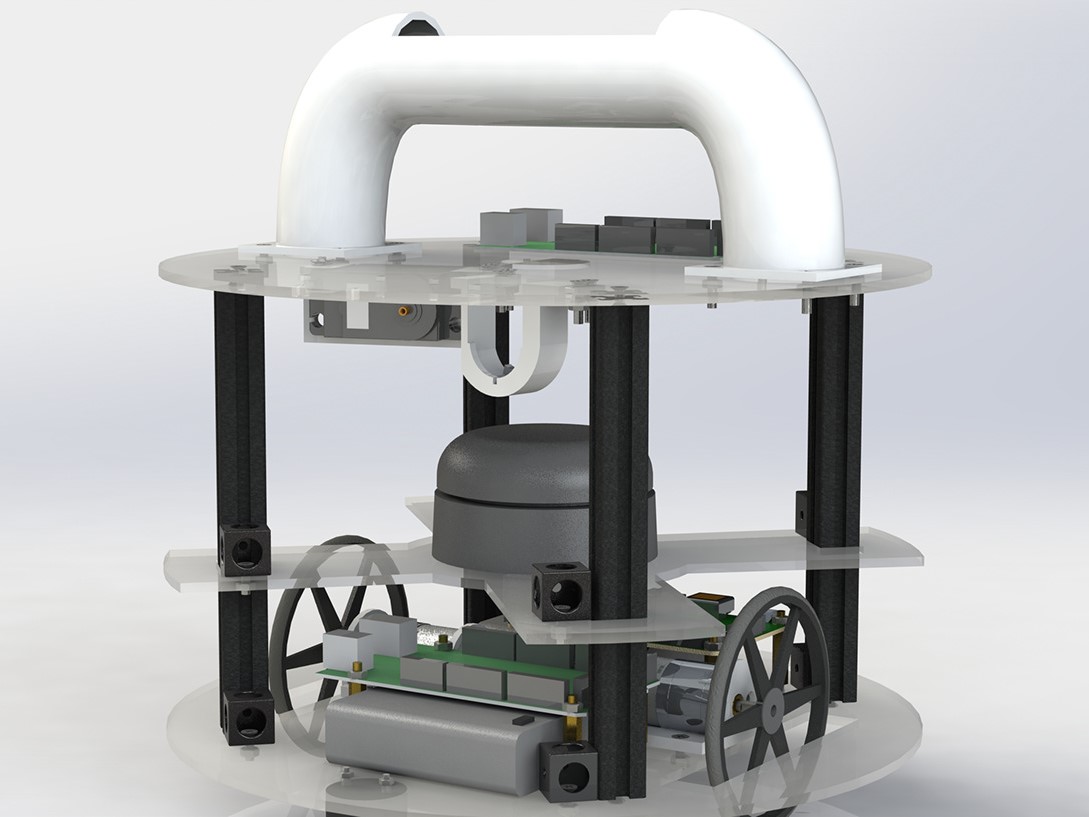
Complete SolidWorks Assembly
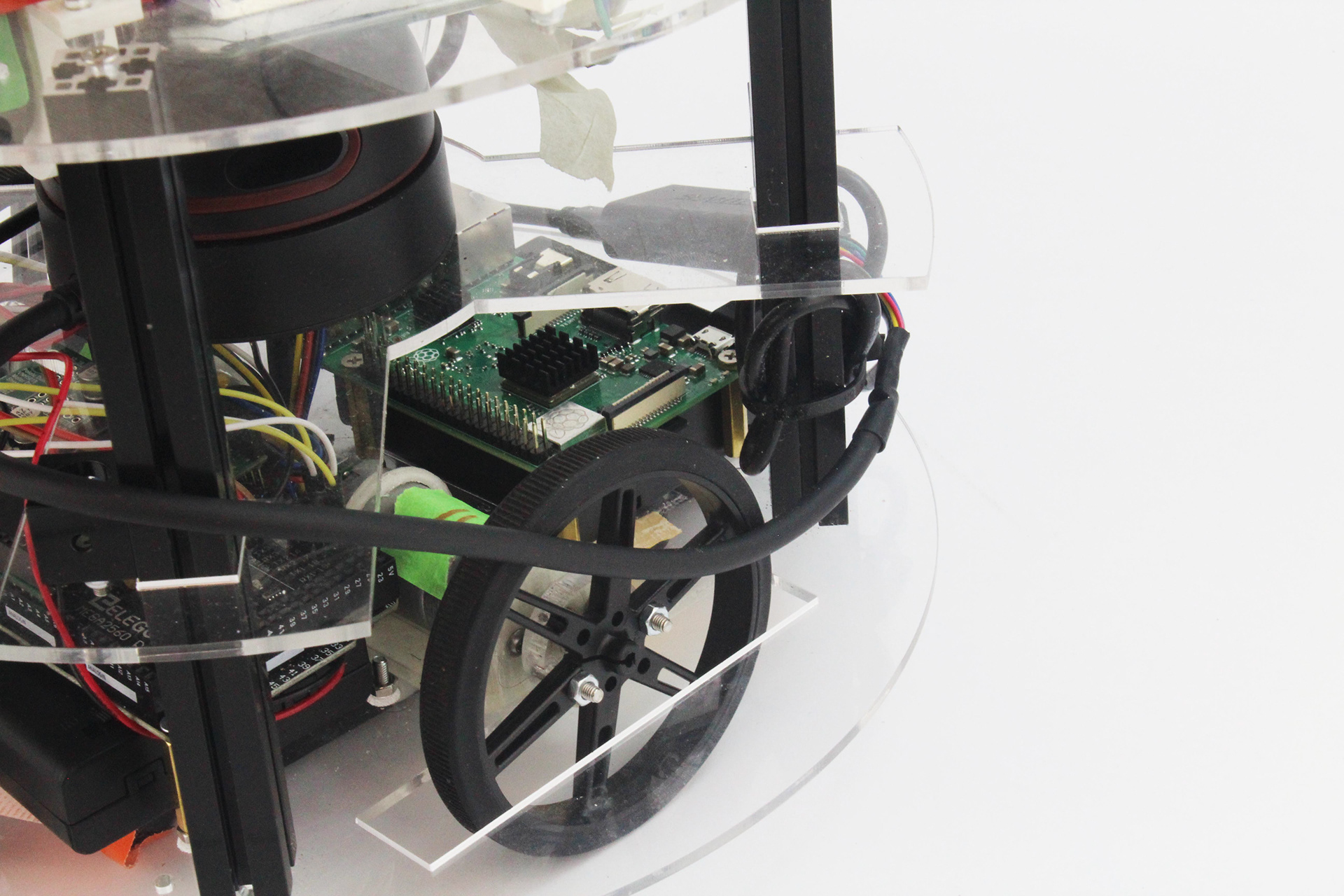
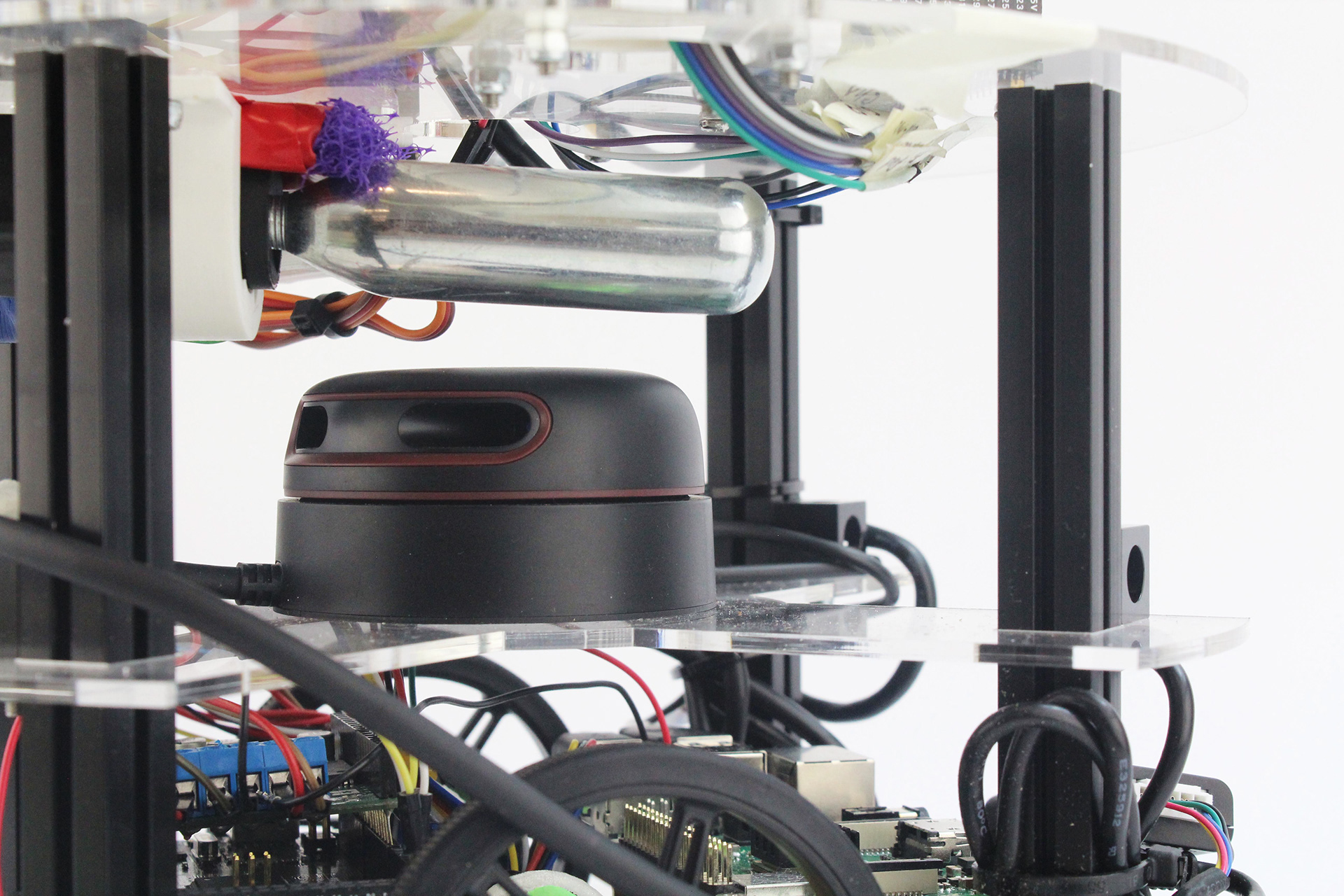
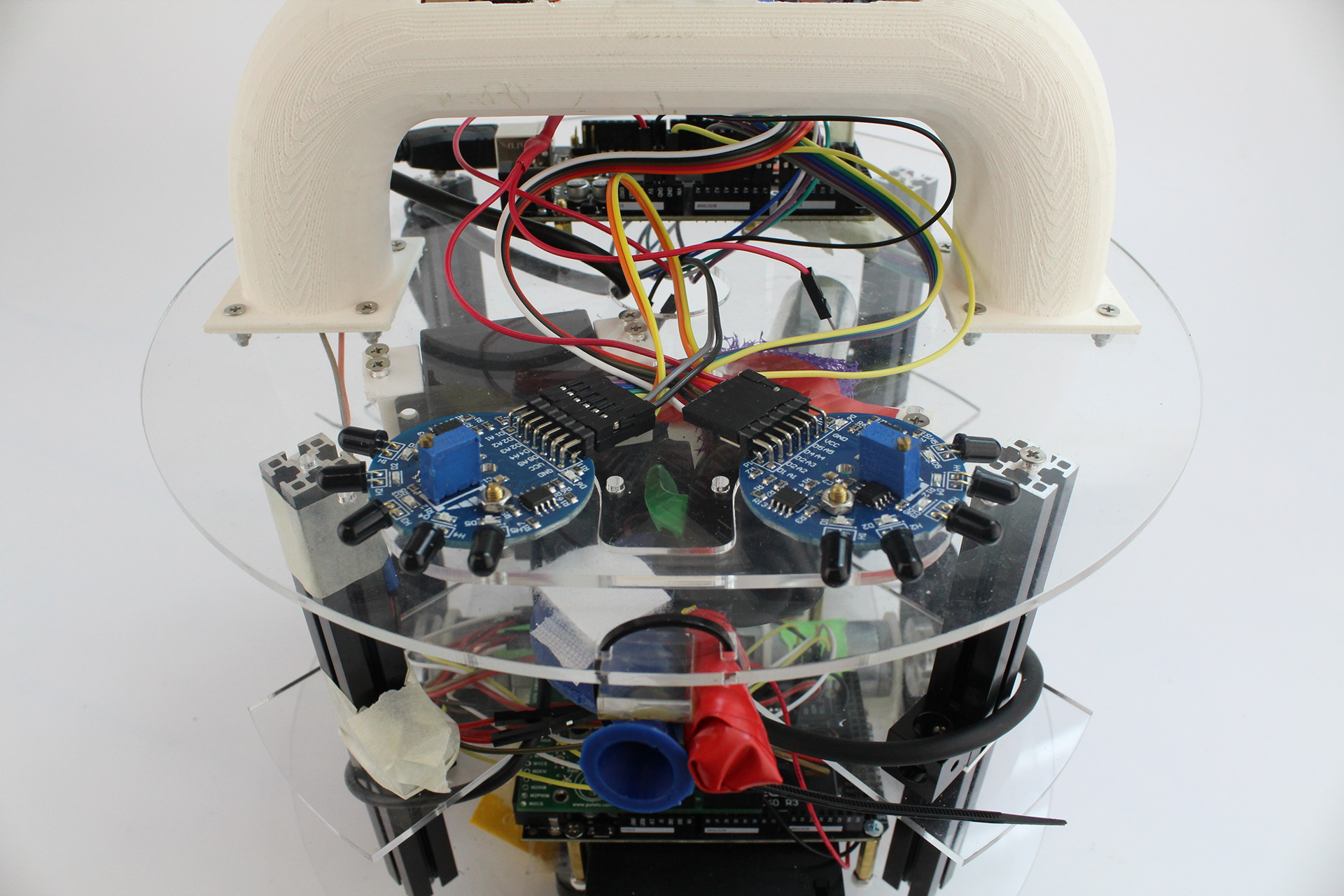
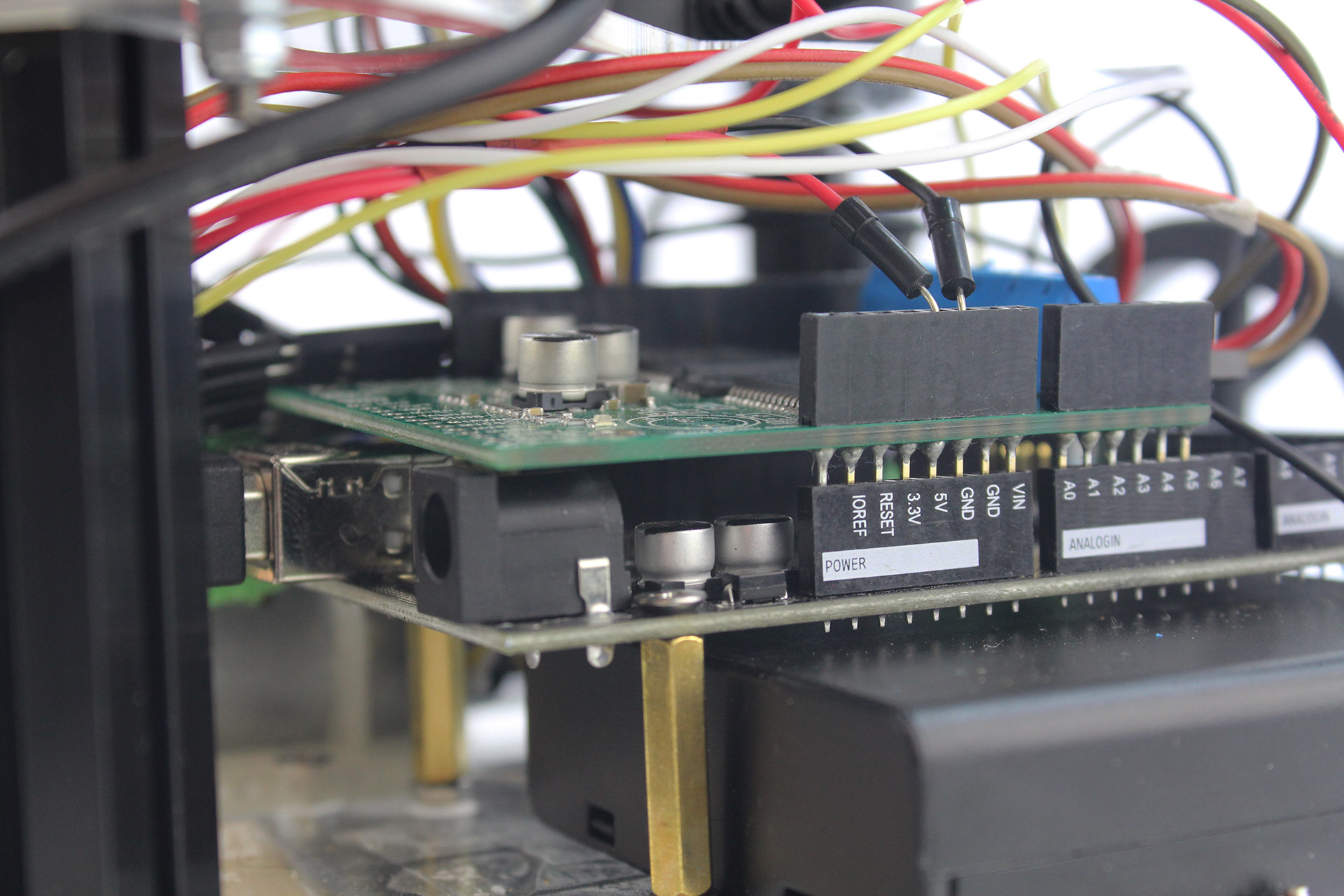
I designed the base layer of the robot, which hosts a raspberry pi, an Arduino Mega, all the batteries, and the motors. I used stand-offs and zip ties to secure all the components from shifting during the robot's movement.
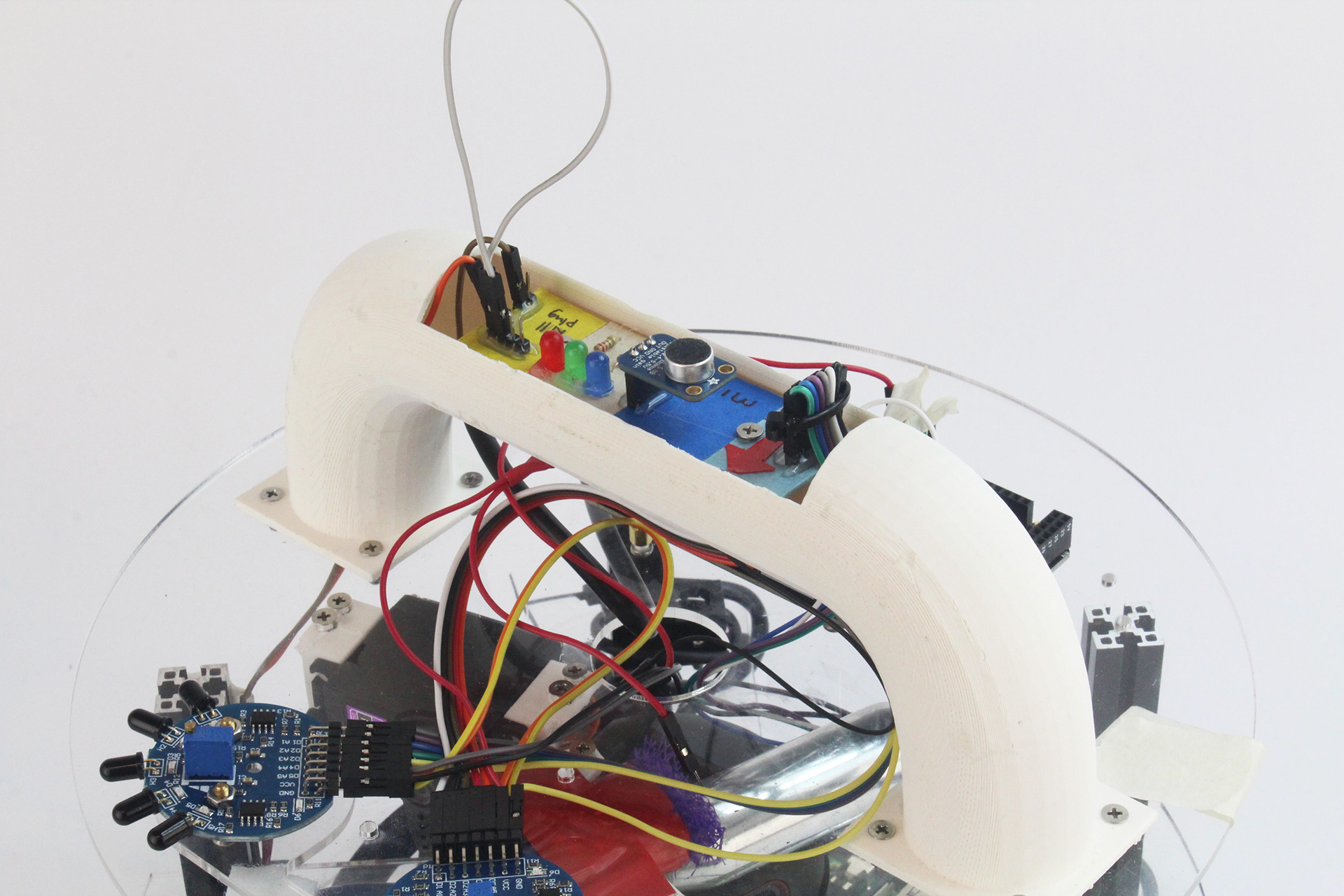
The competition also requires all robots to have a control circuit on a handle, which consists of 3 LEDs for different signals, a microphone, and a kill plug. Therefore, I designed a simple PCB that hosts all the components, as well as a hollowed handle that hides all the wires inside.

Testing Videos