MakeHarvard Dum-E IoT
This was originally a make-athon project during the MakeHarvard Competition in Feburary 2019 by myself ad 3 other team members View the original Devpost page here. The cover image is an improved design made after the competition, which is shown towards the end of the page.
Version 1
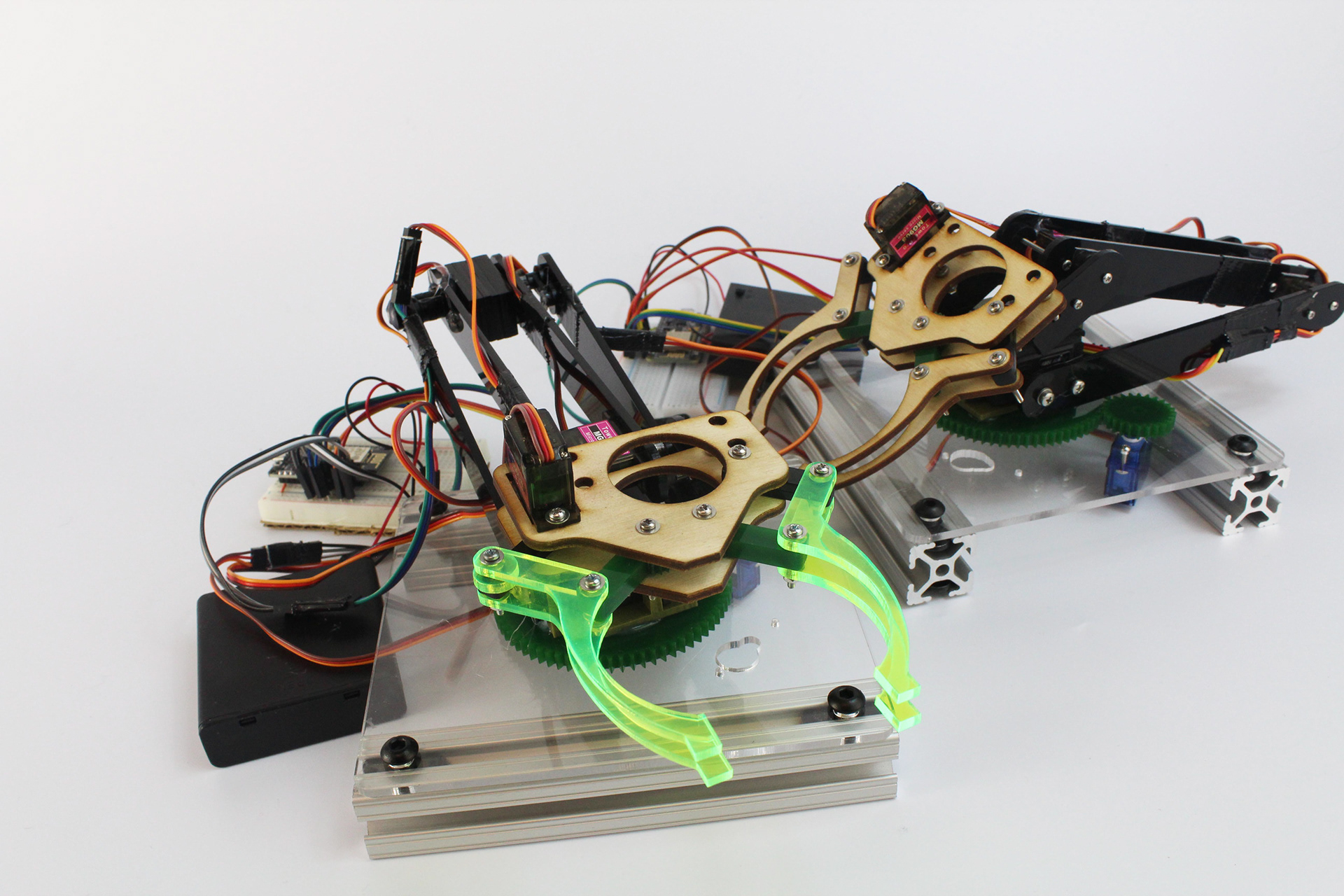
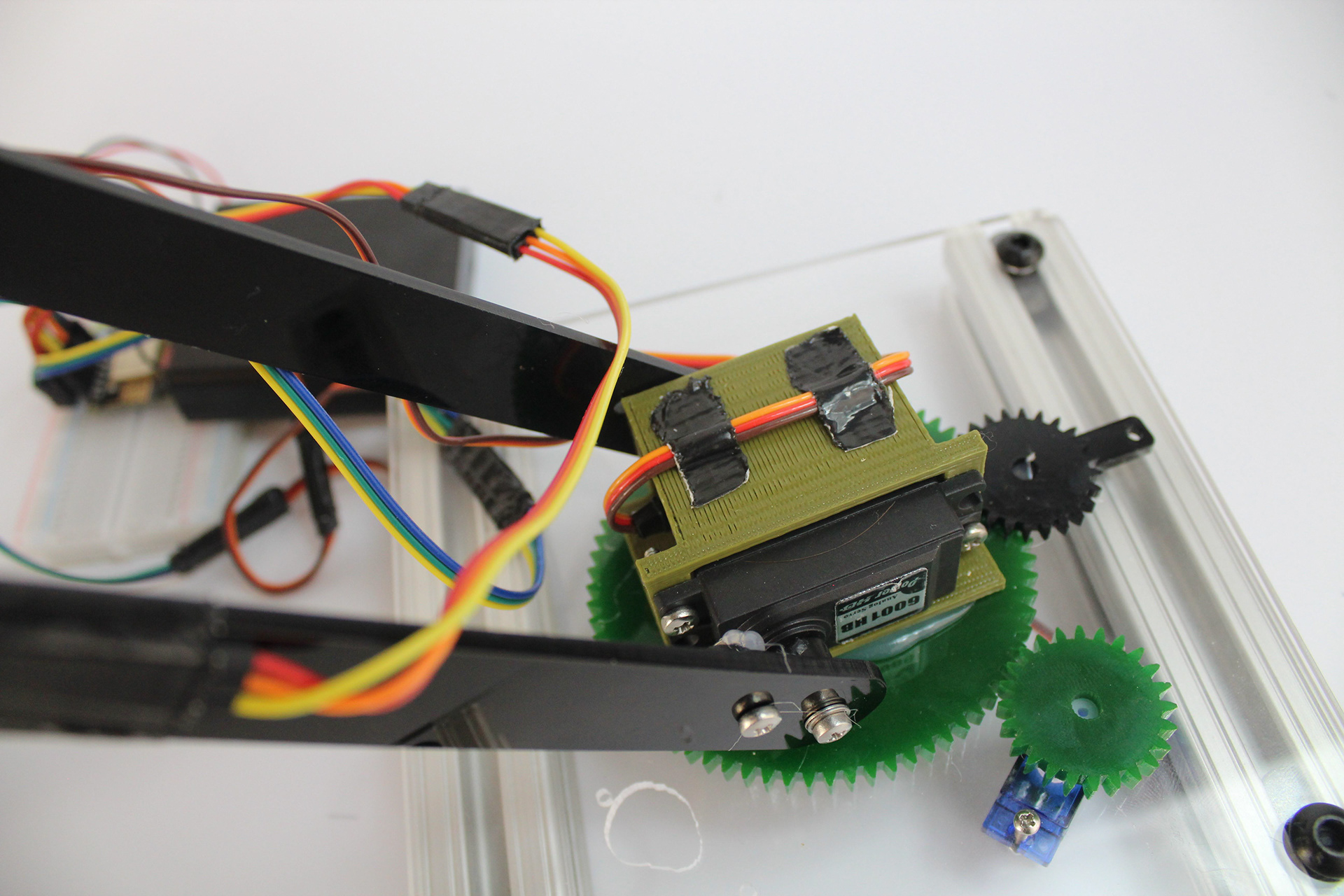
During the competition, we made 3 robot arms (or more!) that are controlled by the Internet of Things. Everything about it, from ideation to the final product, were created within 24 hours of the competition. The idea behind this project is to create an easy-to-remake robot arm that can be used as a teaching tool for robotics, the Internet of Things, etc.

Hexapod Walked for the First Time
Specifically, I designed and fabricated the main arm structure, while making sure the mechanism integrates well with the gripper and the rotating base (designed by two other team members). I also made a video that captures the experience during the competition.
Version 2
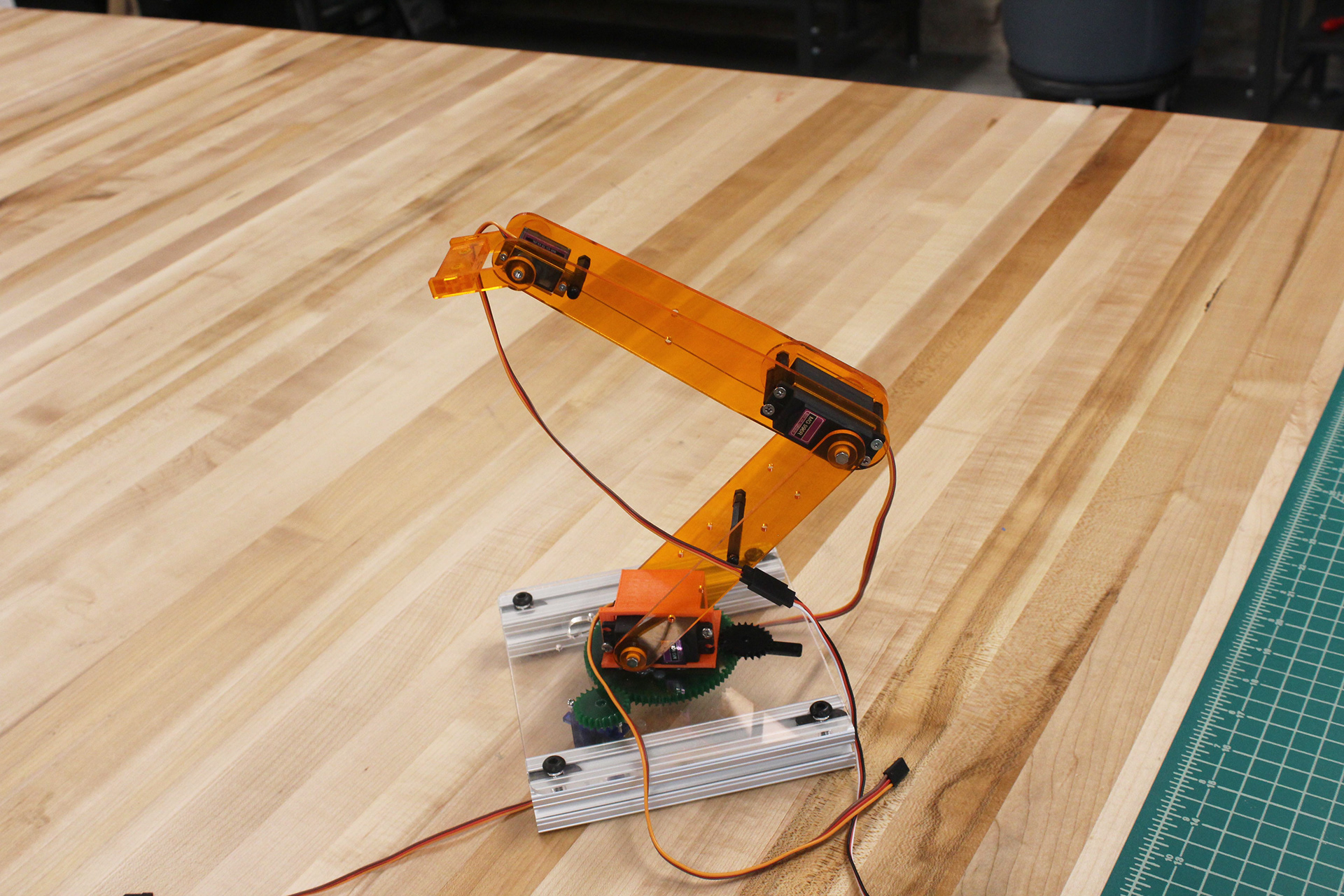
The first version were created under limited time and materials. As of now, I am currently working on re-designing the main arm structure to make it easier to assemble, more structurally sound, and more aesthetically pleasing.
I added standoffs to increase the stability and replaced the middle servo with a bigger one with more torque. I also deep-engraved some parts in the acrylic to create counter-sink holes, to attach to the servo, and to hold the nuts in place.